技术特征:
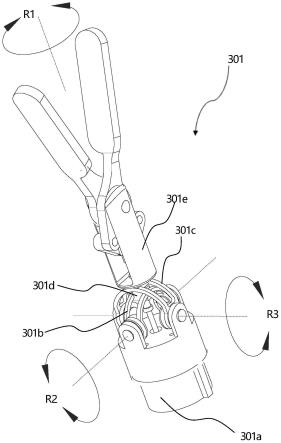
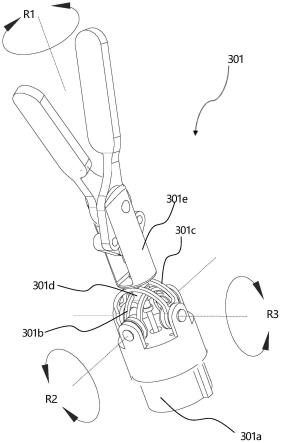
1.一种前端执行装置,其特征在于,包括:第一驱动臂,所述第一驱动臂能够绕第一轴转动;以及第二驱动臂,所述第二驱动臂能够绕第二轴转动,并与执行组件连接;其中,所述第一轴与所述第二轴相互垂直并相交于一点,以实现所述前端执行装置两个自由度方向的运动。2.根据权利要求1所述的前端执行装置,其特征在于,所述第一驱动臂包括:第一转向臂,所述第一转向臂与连接座铰接于第一轴,并能够绕所述第一轴转动;以及第一连杆,所述第一连杆铰接于所述第一转向臂的第一端,所述第一连杆能够绕与所述第一转向臂铰接的第二轴转动;以及所述第二驱动臂包括:第二转向臂,所述第二转向臂与连接座铰接于第二轴,并能够绕所述第二轴转动;以及第二连杆,所述第二连杆与所述第一连杆铰接,并与用于连接执行组件的支撑座连接,所述第二连杆铰接于所述第二转向臂的第一端,并能绕所述第一轴转动。3.根据权利要求1所述的前端执行装置,其特征在于,还包括:驱动组件,所述驱动组件包括:第一丝轮,所述第一丝轮设置于第一转向臂第二端,所述第一丝轮的转动能够带动第一转向臂绕所述第一轴转动;第二丝轮,所述第二丝轮设置于第二转向臂第二端,所述第二丝轮的转动能够带动第二转向臂绕所述第二轴转动。4.根据权利要求3所述的前端执行装置,其特征在于,所述驱动组件还包括:第一驱动丝,绕设于第一丝轮,所述第一驱动丝连接至驱动装置,且第一驱动丝的一点与所述第一丝轮固定连接;以及第二驱动丝,绕设于第二丝轮,所述第二驱动丝连接至驱动装置,且第二驱动丝的一点与所述第二丝轮固定连接。5.根据权利要求3所述的前端执行装置,其特征在于,在所述前端执行装置上建立笛卡尔坐标系,所述笛卡尔坐标系原点为所述第一连杆与第二连杆的交点,所述笛卡尔坐标系的z轴方向垂直于所述第一连杆与第二连杆形成的平面,所述第一驱动臂的运动螺旋系为:(1,0,0;-a,0,0)、(0,1,0;0,a,0),所述第二驱动臂(304c)的运动螺旋系为:(0,1,0;0,-a,0)、(1,0,0;a,0,0),其中,a为所述前端执行装置从执行组件与第二驱动臂连接处到笛卡尔坐标系原点的轴向半径。6.根据权利要求1所述的前端执行装置,其特征在于,所述前端执行装置的负载方向与弹性变形敏感方向不同。7.根据权利要求2所述的前端执行装置,其特征在于,所述第一转向臂及第二转向臂为5mm以内的零件或壁厚1mm内的零件,和/或所述第一转向臂为1/4圆弧形连杆,所述第二转向臂为1/4圆弧形连杆。8.一种如所述权利要求1-7任一项所述的前端执行装置的控制方法,包括:控制操纵器的第一驱动器驱动致动机构内的驱动丝轮转动,带动所述第一驱动臂和/或所述第二驱动臂绕其旋转轴线转动,以操纵所述前端执行装置进行一个或两个自由度方
向的运动。9.一种计算机可读存储介质,其上存储有可执行指令,所述指令在被执行时用于实现权利要求8所述的前端执行装置的控制方法。10.一种外科手术器械,其特征在于,所述外科手术器械包括如权利要求1-7任一项所述的前端执行装置。11.一种机械手装置,其特征在于,包括:关节组件,所述关节组件包括如权利要求1-7任一项所述的前端执行装置。12.根据权利要求11所述的机械手装置,其特征在于,所述前端执行装置设置于机械手装置中的从机械手的所述关节组件,其中,所述从机械手的操作指令由主机械手发送。
技术总结
本公开提供了一种前端执行装置,包括:第一驱动臂,所述第一驱动臂能够绕第一轴转动;以及第二驱动臂,所述第二驱动臂能够绕第二轴转动,并与执行组件连接;其中,所述第一轴与所述第二轴相互垂直并相交于一点,以实现所述前端执行装置两个自由度方向的运动。端执行装置两个自由度方向的运动。端执行装置两个自由度方向的运动。
技术研发人员:王树新
受保护的技术使用者:天津大学医疗机器人与智能系统研究院
技术研发日:2020.11.30
技术公布日:2022/9/13
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。