技术特征:
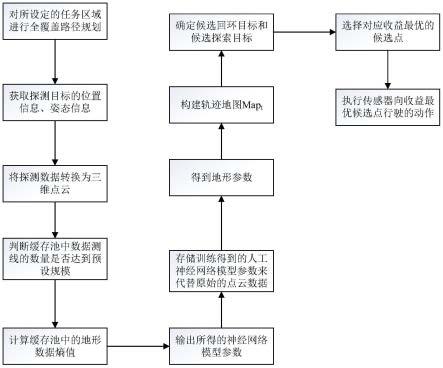
1.一种智慧城市传感器地形探测数据压缩存储方法,其特征在于,包括以下步骤:(1)将传感器执行探测任务的区域划分为a个子任务区域;对所设定的任务区域进行全覆盖路径规划;(2)传感器在子任务区域内执行探测任务,获取探测目标的位置信息、姿态信息;(3)以传感器的随体坐标系为基准将探测数据转换为三维点云,通过坐标变换得到大地坐标系的城市地形数据;(4)将步骤(2)中的位置信息、姿态信息数据放入缓存池中,判断缓存池中数据测线的数量是否达到预设规模;若未达到,则返回步骤(2)继续获取当前子任务区域的数据;否则,则执行步骤(5);(5)计算缓存池中的地形数据熵值,判断是否达到输出阈值;若数据熵值超出输出阈值,则执行步骤(6);否则,返回步骤(2)继续获取当前子任务区域的数据;(6)调取缓存池中的数据,并输入到构建的人工神经网络中进行回归训练,当参数收敛后,输出所得的神经网络模型参数;(7)存储训练得到的人工神经网络模型参数来代替原始的点云数据,实现对地形数据的压缩存储;(8)若未完成对全部子任务区域的探测任务,则返回步骤(2)执行未完成探测的子任务区域的探测;当需要获取某一位置探测数据时,根据该位置所属的子任务区域获取对应的人工神经网络模型参数,将该位置的横纵坐标输入到对应的人工神经网络模型中,得到地形参数;(9)执行传感器同步定位与地图绘制,并构建轨迹地图map
t
;(10)根据轨迹地图确定候选回环目标和候选探索目标;(11)根据效用方程计算到达每个候选点的收益,选择对应收益最优的候选点,根据传感器向收益最优候选点行驶的动作n
′
g
,判断执行回环任务或探索任务;(12)执行传感器向收益最优候选点行驶的动作n
′
g
,判断设定的任务区域是否探索完成;若完成探索,则结束;否则,返回步骤(9)。2.根据权利要求1所述的一种智慧城市传感器地形探测数据压缩存储方法,其特征在于,所述的步骤(2)中,对于每一子任务区域,获取先验城市地形数据进行预训练,从而设置输出阈值u
th
与人工神经网络的中间层节点数,预训练步骤如下:(2.1)获取子任务区域的a个先验地形块,计算各先验地形块的地形数据熵值g
r,n
,得到g
r
={g
r,n
|n=1,2,...,a};(2.2)人工神经网络可容纳的最大中间层节点数量z;(2.3)依次计算地形数据熵值g
r,n
在不同中间层节点数o对应的人工神经网络模型中对地形拟合的误差r
no
,并记录时间消耗p
no
,得到误差集r和时间集p:r={r
no
|n=1,2,...,a,o=1,.2...,z};p={p
no
|n=1,2,...,a,o=1,.2...,z};(2.4)对误差集和时间集分别进行归一化处理;
(2.5)计算调和平均数s
no
;选取调和平均数s最小时对应的[n
*
,o
*
]作为结果,具体计算如下:(2.6)设置输出阈值u
th
为设置人工神经网络的中间层节点数为o
*
。3.根据权利要求1所述的一种智慧城市传感器地形探测数据压缩存储方法,其特征在于,所述构建缓存池数据的步骤包括:(4.1)采集第v次测量时得到的测线横坐标测线纵坐标测线深度值三个参数大小均为a1×
1;a1表示测线中包含的测点数量;(4.2)采集当前缓存池中的数据测线数量g;(4.3)构建缓存池数据data为:data={x;y;z};data={x;y;z};data={x;y;z};所述地形数据熵值获取的步骤包括:获得测线v中测点w的测绘值m
ij
和缓存池的地形测绘值的均值和缓存池的地形测绘值的均值和缓存池的地形测绘值的均值4.根据权利要求1所述的一种智慧城市传感器地形探测数据压缩存储方法,其特征在于,所述步骤(9)包括:(9.1)根据传感器测线的平均宽度j将轨迹地图map
t
分成子地图集合;(9.2)提取传感器当前位置(x,y)和位置协方差矩阵ξ(9.3)确定候选点搜索半径:(9.4)搜索半径e内的所有子地图sub
i
,计算子地图的数量num,(9.5)计算子地图的数据矩阵的行列值z
i
,a
i
;(9.6)采集对应位置(x,y)的地形高程u
xy
;(9.7)计算在搜索半径e内的所有子地图的地形费舍尔信息量{g
i
|i=1,2,
…
,num}
||
·
||表示欧式范数;(9.8)提取预设的地形费舍尔信息量阈值g
t
;(9.9)取所有满足g
i
>g
t
的子地图中心点作为回环目标点集合根据当前传感器位置到回环目标的距离,在前进方向上选取相同距离的点作为探索目标点,生成探索目标点集合;(9.10)输出回环候选点集合和探索候选点集合。5.根据权利要求1所述的一种智慧城市传感器地形探测数据压缩存储方法,其特征在于,所述步骤(11)具体为:(11.1)计算受动作n
′
影响的地图体积i
n
′
;(11.2)计算受到每个重访动作相应探索行动影响的地图体积i
ex
;(11.3)计算系统平衡因子τ,(11.4)提取历史控制向量的集合h和历史观测集合m;(11.5)提取执行动作n
′
而探测得到的地图信息z(n
′
);z表示某一栅格的地图信息;(11.6)计算通过预测得到的到达目标点时传感器的位置协方差当前时刻传感器的位置协方差(11.7)采集目标子地图sub
i
的地形费舍尔信息量g
i
和搜索范围内最大的地形费舍尔信息量g
max
;(11.8)计算执行动作n
′
后传感器的位姿不确定性;(11.9)计算栅格z的香农熵:(11.10)计算栅格z的瑞利熵:(11.10)计算栅格z的瑞利熵:(11.11)执行动作n
′
时的互信息v
n
′
:(11.12)计算到达每个候选点的收益τv
n
′
;
(11.13)选择收益最优时传感器向对应的候选点行进的动作n
′
g
:6.根据权利要求1所述的一种智慧城市传感器地形探测数据压缩存储方法,其特征在于,所述的人工神经网络包括输入层、隐藏层、输出层,人工神经网络的输入为测量数据的横坐标与纵坐标,输出为地形测量值,人工神经网络的中间层节点数与地形数据熵值正相关。
技术总结
本发明属于三维定位重构技术领域,具体涉及一种智慧城市传感器地形定位建图方法。包括将传感器执行探测任务的区域划分为A个子任务区域;对所设定的任务区域进行全覆盖路径规划;传感器在子任务区域内执行探测任务,获取探测目标的位置信息、姿态信息;以传感器的随体坐标系为基准将探测数据转换为三维点云,通过坐标变换得到大地坐标系的城市地形数据等。本发明不需要物理场数据库的支持,通过研究传感器定向算法,能够在智慧城市复杂非结构化的环境中完成自主同步定位,该同步定位模式隐蔽性高,鲁棒性强,且通过主动对地形进行有目的性地回溯,从而使得传感器能够更有效的在不依赖载体的情况下获得高精度的位置信息和城市地形图。地形图。地形图。
技术研发人员:ꢀ(74)专利代理机构
受保护的技术使用者:哈尔滨工程大学
技术研发日:2022.06.12
技术公布日:2022/9/2
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。