技术特征:
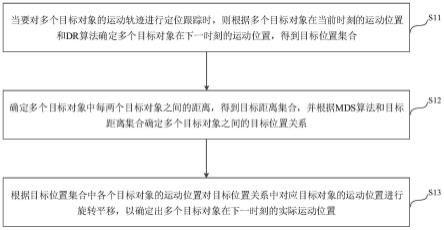
1.一种定位跟踪方法,其特征在于,包括:当要对多个目标对象的运动轨迹进行定位跟踪时,则根据多个目标对象在当前时刻的运动位置和dr算法确定多个目标对象在下一时刻的运动位置,得到目标位置集合;确定多个目标对象中每两个目标对象之间的距离,得到目标距离集合,并根据mds算法和所述目标距离集合确定多个目标对象之间的目标位置关系;根据所述目标位置集合中各个目标对象的运动位置对所述目标位置关系中对应目标对象的运动位置进行旋转平移,以确定出多个目标对象在下一时刻的实际运动位置。2.根据权利要求1所述的一种定位跟踪方法,其特征在于,多个目标对象包括运动的目标对象和静止的目标对象。3.根据权利要求1所述的一种定位跟踪方法,其特征在于,所述根据多个目标对象在当前时刻的运动位置和dr算法确定多个目标对象在下一时刻的运动位置的过程,包括:利用imu确定多个目标对象的运动位姿以及加速度,并根据多个目标对象在当前时刻的运动位置和所述dr算法确定多个目标对象在下一时刻的运动位置。4.根据权利要求1所述的一种定位跟踪方法,其特征在于,所述根据所述目标位置集合中各个目标对象的运动位置对所述目标位置关系中对应目标对象的运动位置进行旋转平移的过程,包括:确定所述目标位置关系中所有目标对象的相对位置中心,得到第一位置,并确定所述目标位置集合中所有目标对象的相对位置中心,得到第二位置;获取所述第一位置和所述第二位置之间的目标平移量;根据所述目标平移量对所述目标位置关系中各个目标对象的位置进行平移,得到平移后目标位置关系;获取所述平移后目标位置关系与所述目标位置关系中各个目标对象的位置变化量,得到目标变量;对所述目标变量进行奇异值分解,得到目标旋转量;根据所述目标旋转量对所述平移后目标位置关系中的各个目标对象进行旋转。5.根据权利要求1至4任一项所述的一种定位跟踪方法,其特征在于,所述确定多个目标对象中每两个目标对象之间的距离,得到目标距离集合的过程,包括:利用uwb确定多个目标对象中每两个目标对象之间的距离,得到所述目标距离集合。6.根据权利要求5所述的一种定位跟踪方法,其特征在于,还包括:若多个目标对象中存在实际运动位置为已知量的标识对象,则根据所述uwb、所述标识对象的实际运动位置以及所述dr算法确定多个目标对象在下一时刻的运动位置,得到校正位置集合;相应的,所述根据所述目标位置集合中各个目标对象的运动位置对所述目标位置关系中对应目标对象的运动位置进行旋转平移的过程,包括:根据所述校正位置集合中各个目标对象的运动位置对所述目标位置关系中对应目标对象的运动位置进行旋转平移。7.根据权利要求6所述的一种定位跟踪方法,其特征在于,所述根据所述目标位置集合中各个目标对象的运动位置对所述目标位置关系中对应目标对象的运动位置进行旋转平移,以确定出多个目标对象在下一时刻的实际运动位置的过程之后,还包括:
将多个目标对象的实际运动位置判定为多个目标对象在当前时刻的运动位置,并继续执行所述根据多个目标对象在当前时刻的运动位置和dr算法确定多个目标对象在下一时刻的运动位置的步骤。8.一种定位跟踪装置,其特征在于,包括:位置预测模块,用于当要对多个目标对象的运动轨迹进行定位跟踪时,则根据多个目标对象在当前时刻的运动位置和dr算法确定多个目标对象在下一时刻的运动位置,得到目标位置集合;关系计算模块,用于确定多个目标对象中每两个目标对象之间的距离,得到目标距离集合,并根据mds算法和所述目标距离集合确定多个目标对象之间的目标位置关系;位置平移模块,用于根据所述目标位置集合中各个目标对象的运动位置对所述目标位置关系中对应目标对象的运动位置进行旋转平移,以确定出多个目标对象在下一时刻的实际运动位置。9.一种定位跟踪设备,其特征在于,包括:存储器,用于存储计算机程序;处理器,用于执行所述计算机程序时实现如权利要求1至7任一项所述的一种定位跟踪方法的步骤。10.一种计算机可读存储介质,其特征在于,所述计算机可读存储介质上存储有计算机程序,所述计算机程序被处理器执行时实现如权利要求1至7任一项所述的一种定位跟踪方法的步骤。
技术总结
本申请公开了一种定位跟踪方法、装置、设备及介质,属于定位技术领域,该方法包括:当要对多个目标对象的运动轨迹进行定位跟踪时,根据多个目标对象的运动位置和DR算法确定它们在下一时刻的运动位置,得到目标位置集合;确定多个目标对象中每两个目标对象之间的距离,得到目标距离集合,根据MDS算法和目标距离集合确定多个目标对象之间的目标位置关系;根据目标位置集合中各个目标对象的运动位置对目标位置关系中对应目标对象的运动位置进行旋转平移,以确定出多个目标对象在下一时刻的实际运动位置。因为该方法能够对目标对象在运动过程中的位置进行实时修正,所以,通过该方法就可以显著提高在对目标对象运动轨迹进行预测时的精确度。测时的精确度。测时的精确度。
技术研发人员:张华龙 李华伟
受保护的技术使用者:深圳芯邦科技股份有限公司
技术研发日:2022.05.19
技术公布日:2022/8/26
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。