技术特征:
1.一种能够在视场上操作的光检测和测距系统中的光束引导的方法,所述方法包括:将一个或更多个第一光束提供给光束导向器,以由所述光检测和测距系统在所述视场内实现第一角分辨率和第一时间分辨率;接收从环境返回的光,并由所述光检测和测距系统生成指示所述环境的特性的至少一个信号;接收对与一个或更多个第二光束相关联的扫描轮廓的选择,以在所述视场内实现第二角分辨率和第二时间分辨率,并将选择的所述一个或更多个第二光束提供给所述光束导向器;其中,所述选择基于所述至少一个信号,并且其中,在所述视场的至少一部分上,所述第二角分辨率不同于所述第一角分辨率,并且其中,所述一个或更多个第二光束在所述视场的第一部分内实现所述第二角分辨率,并且还在所述视场的不同于所述第一部分的第二部分内实现第三角分辨率,其中,所述第三角分辨率不同于所述第二角分辨率。2.一种能够在视场上操作的光检测和测距系统中的光束引导的方法,所述方法包括:由波长受控光源将一个或更多个第一光束提供给被配置成基于波长将光引导到环境中的光束导向器,以由所述光检测和测距系统在所述视场内实现第一角分辨率和第一时间分辨率;接收从环境返回的光,并由所述光检测和测距系统生成指示所述环境的特性的至少一个信号;接收对与一个或更多个第二光束相关联的扫描轮廓的选择,以在所述视场内实现第二角分辨率和第二时间分辨率,并将选择的所述一个或更多个第二光束提供给所述光束导向器;其中,所述选择基于所述至少一个信号,并且其中,在所述视场的至少一部分上,所述第二角分辨率不同于所述第一角分辨率,并且其中,所述一个或更多个第二光束在所述视场的第一部分内实现所述第二角分辨率,并且还在所述视场的不同于所述第一部分的第二部分内实现第三角分辨率,其中,所述第三角分辨率不同于所述第二角分辨率。3.根据权利要求2所述的方法,其中,所述一个或更多个第一光束包括第一波长信道集合,并且所述一个或更多个第二光束包括不同于所述第一波长信道集合的第二波长信道集合,并且其中,所述方法还包括在所述一个或更多个第二光束之后将一个或更多个第三光束提供给所述光束定向器,其中,所述一个或更多个第三光束包括所述第一波长信道集合。4.根据权利要求2或权利要求3所述的方法,其中,所述第一光束和所述第二光束包括光脉冲,并且其中,在所述第一光束中的第一波长范围内的光脉冲多于在所述第二光束中的所述第一波长范围内的光脉冲。5.根据权利要求4所述的方法,其中,在所述第一光束中的不同于所述第一波长范围的第二波长范围内的光脉冲少于在所述第二光束中的所述第二波长范围内的光脉冲。6.根据权利要求5所述的方法,其中,所述第一光束和所述第二光束包括相同数量的光脉冲。7.根据权利要求2至6中任一项所述的方法,其中,所述第一光束和所述第二光束包括光学测距信号,并且其中,在所述一个或更多个第一光束中的第一波长范围内的光学测距信号多于在所述一个更或更多个第二光束中的所述第一波长范围内的光学测距信号。
8.根据权利要求1至7中任一项所述的方法,其中,所述一个或更多个第一光束实现所述光检测和测距系统的第一视场,并且所述一个或更多个第二光束实现所述光检测和测距系统的第二视场,所述第二视场不同于所述第一视场。9.根据权利要求1至8中任一项所述的方法,其中,所述一个或更多个第一光束在所述视场的第三部分内实现所述第一角分辨率,并且还在所述视场的第四部分内实现第四角分辨率,其中,所述第四角分辨率不同于所述第一角分辨率,并且所述视场的第四部分不同于所述视场的第三部分。10.根据权利要求9所述的方法,其中,所述第三角分辨率与所述第四角分辨率相同。11.根据权利要求9所述的方法,其中,所述第三角分辨率不同于所述第四角分辨率。12.根据权利要求9至11中任一项所述的方法,其中,所述视场的第一部分覆盖与所述视场的第二部分相同的角度范围,并且所述视场的第二部分覆盖与所述视场的第四部分相同的角度范围。13.根据权利要求1至12中任一项所述的方法,其中,所述一个或更多个第一光束跨整个所述视场实现所述第一角分辨率。14.根据权利要求13所述的方法,其中,所述一个或更多个第一光束跨整个所述视场实现基本上恒定的角分辨率。15.根据权利要求1至14中任一项所述的方法,其中,所述第二时间分辨率与所述第一时间分辨率相同。16.根据权利要求1至14中任一项所述的方法,其中,所述第二时间分辨率不同于所述第一时间分辨率。17.根据权利要求1至16中任一项所述的方法,其中:所述方法还包括基于指示所述环境的特性的所述至少一个信号来确定所述视场中的地平线;以及基于确定的地平线来选择所述扫描轮廓。18.根据权利要求17所述的方法,其中,所述第二角分辨率高于所述第三角分辨率,并且选择的过程包括将所述扫描轮廓确定为在所述确定的地平线的位置处具有所述第一部分。19.根据权利要求17或权利要求18所述的方法,其中,所述扫描轮廓是用于所述光束导向器的多个不同可选择扫描轮廓中的一个,所述多个可选择扫描轮廓包括在与所述视场中不同的可确定的地平线相对应的不同位置处角分辨率较高的区域。20.根据权利要求1至19中任一项所述的方法,其中,所述角分辨率是关于所述视场中的第一维度的,并且选择的扫描轮廓是第一扫描轮廓,并且其中,所述方法还包括跨所述第一维度和与所述第一维度正交的第二维度执行扫描迭代,其中,在所述扫描迭代内,所述视场的第一水平区段使用所述第一扫描轮廓,并且所述视场的第二水平区段使用第二扫描轮廓。21.根据权利要求1至20中任一项所述的方法,其中:所述方法还包括基于指示所述环境的特性的所述至少一个信号来确定在所述视场中的预测的行驶路径;以及基于确定的预测的行驶路径来选择所述扫描轮廓。
22.一种光检测和测距系统,被配置成执行根据前述权利要求中任一项所述的方法。
技术总结
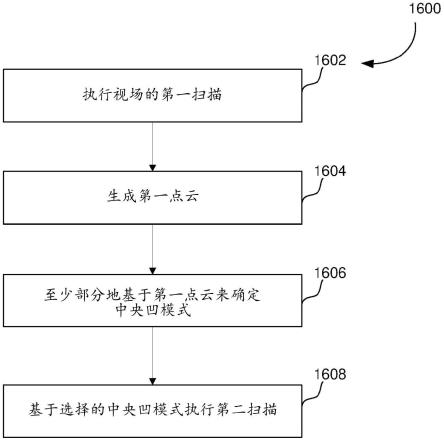
描述了用于将光引导到环境中的方法和装置,例如用于在整个环境中扫描光以进行空间估计的光检测和测距系统中的方法和装置。方法和系统涉及在第一扫描中以一个角分辨率和时间分辨率进行扫描,以及在第二扫描中以不同的角分辨率和时间分辨率(一者或两者)进行扫描。分辨率和时间分辨率(一者或两者)进行扫描。分辨率和时间分辨率(一者或两者)进行扫描。
技术研发人员:西比
受保护的技术使用者:博莱佳私人有限公司
技术研发日:2020.12.24
技术公布日:2022/8/26
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。