技术特征:
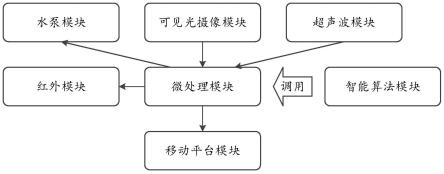
1.一种基于视觉的巡检灭火车,其特征在于,所述巡检灭火车包括超声波模块、微处理器模块、移动平台模块、可见光摄像模块、红外模块、水泵模块以及智能算法模块;所述超声波模块采集周围环境的超声波信息,所述超声波信息用于指示所述巡检灭火车的周围环境;所述微处理器模块结合所述超声波信息以及预设的巡检线路,控制所述移动平台模块驱动所述巡检灭火车按照所述巡检线路移动;所述可见光摄像模块采集视野中的图像信息;所述微处理器模块通过所述智能算法模块配置的火点识别算法,判断所述图像信息中是否出现火点的目标图像信息,若是,则触发所述红外模块采集视野中的红外信息;所述微处理器模块通过所述智能算法模块配置的火点识别算法,确定所述红外信息的火点位置;所述微处理器模块基于所述超声波信息,控制所述移动平台模块驱动所述巡检灭火车向所述火点位置移动,并保持预设的间距;所述微处理器模块控制所述水泵模块,向所述火点位置喷水,以进行灭火。2.根据权利要求1所述的基于视觉的巡检灭火车,所述可见光摄像模块采集的所述图像信息为点阵式数据类型的信息,所述图像信息中每一个点由rgb三原色组成,在判断所述图像信息中出是否出现所述火点的目标图像信息时遵循以下的rgb分量判断关系:r>g>b,r>r
avg
,g>g
avg
,其中,r为rgb图像空间中r分量的值,g为所述rgb图像空间中g分量的值,b为所述rgb图像空间中b分量的值,r
avg
表示整幅图像中红色分量的平均值,g
avg
表示整幅图像中绿色分量的平均值。3.根据权利要求2所述的基于视觉的巡检灭火车,在通过所述rgb分量判断关系确定所述图像信息中出现所述火点的目标图像信息时,所述微处理器模块还将所述图像信息转化为his图像空间的图像信息,并继续判断所述图像信息中出是否出现所述火点的目标图像信息,在判断过程中遵循以下的his分量判断关系:s>0.2,s>(255-r)/20,s≥(255-r)*st/rt,其中,s为所述his图像空间中s分量的值,st为饱和度阈值,st参考范围55~65,rt为红色分量阈值,rt参考范围115~135。4.根据权利要求1所述的基于视觉的巡检灭火车,在通过所述智能算法模块配置的火点识别算法确定所述红外信息的火点位置时,遵循以下判断关系:当所述所处场景为空间大于预设值的第一场景时,将所述红外信息对应的温度值大于50
°
的位置确定为所述火点位置;当所述当前所处场景为空间小于预设值的第二场景时,将所述红外信息对应的温度值大于70
°
的位置确定为所述火点位置。5.根据权利要求1所述的基于视觉的巡检灭火车,其特征在于,所述智能算法模块还配
置有避障算法,所述微处理器模块控制所述移动平台模块驱动所述巡检灭火车移动时,通过所述避障算法绕开预定运动线路上的障碍物,并继续根据预定运动线路进行移动。6.一种所述的基于视觉的巡检灭火车的控制方法,其特征在于,所述方法应用于所述巡检灭火车,所述巡检灭火车包括超声波模块、微处理器模块、移动平台模块、可见光摄像模块、红外模块、水泵模块以及智能算法模块,所述方法包括:所述超声波模块采集周围环境的超声波信息,所述超声波信息用于指示所述巡检灭火车的周围环境;所述微处理器模块结合所述超声波信息以及预设的巡检线路,控制所述移动平台模块驱动所述巡检灭火车按照所述巡检线路移动;所述可见光摄像模块采集视野中的图像信息;所述微处理器模块通过所述智能算法模块配置的火点识别算法,判断所述图像信息中是否出现火点的目标图像信息,若是,则触发所述红外模块采集视野中的红外信息;所述微处理器模块通过所述智能算法模块配置的火点识别算法,确定所述红外信息的火点位置;所述微处理器模块基于所述超声波信息,控制所述移动平台模块驱动所述巡检灭火车向所述火点位置移动,并保持预设的间距;所述微处理器模块控制所述水泵模块,向所述火点位置喷水,以进行灭火。7.根据权利要求6所述的基于视觉的巡检灭火车的控制方法,所述可见光摄像模块采集的所述图像信息为点阵式数据类型的信息,所述图像信息中每一个点由rgb三原色组成,在判断所述图像信息中出是否出现所述火点的目标图像信息时遵循以下的rgb分量判断关系:r>g>b,r>r
avg
,g>g
avg
,其中,r为rgb图像空间中r分量的值,g为所述rgb图像空间中g分量的值,b为所述rgb图像空间中b分量的值,r
avg
表示整幅图像中红色分量的平均值,g
avg
表示整幅图像中绿色分量的平均值。8.根据权利要求7所述的基于视觉的巡检灭火车的控制方法,在通过所述rgb分量判断关系确定所述图像信息中出现所述火点的目标图像信息时,所述方法还包括:所述微处理器模块将所述图像信息转化为his图像空间的图像信息,并继续判断所述图像信息中出是否出现所述火点的目标图像信息,在判断过程中遵循以下的his分量判断关系:s>0.2,s>(255-r)/20,s≥(255-r)*st/rt,其中,s为所述his图像空间中s分量的值,st为饱和度阈值,st参考范围55~65,rt为红色分量阈值,rt参考范围115~135。9.根据权利要求6所述的基于视觉的巡检灭火车的控制方法,在通过所述智能算法模块配置的火点识别算法确定所述红外信息的火点位置时,遵循以下判断关系:
当所述所处场景为空间大于预设值的第一场景时,将所述红外信息对应的温度值大于50
°
的位置确定为所述火点位置;当所述当前所处场景为空间小于预设值的第二场景时,将所述红外信息对应的温度值大于70
°
的位置确定为所述火点位置。10.一种计算机可读存储介质,其特征在于,所述计算机可读存储介质存储有多条指令,所述指令适于处理器进行加载,以执行权利要求6至9任一项所述的方法。
技术总结
本申请提供了一种基于视觉的巡检灭火车及其控制方法,在获取图像信息并通过视觉识别来判断存在火点时,还继续通过红外检测进行二次确定,如此大大提高了火灾判断精度。对于基于视觉的巡检灭火车,超声波模块采集周围环境的超声波信息;微处理器模块结合超声波信息以及预设的巡检线路,控制移动平台模块驱动巡检灭火车按照巡检线路移动;可见光摄像模块采集视野中的图像信息;微处理器模块判断图像信息中是否出现火点的目标图像信息,若是,则触发红外模块采集视野中的红外信息;微处理器模块确定红外信息的火点位置;微处理器模块基于超声波信息,控制移动平台模块驱动巡检灭火车向火点位置移动;微处理器模块控制水泵模块,向火点位置喷水。火点位置喷水。火点位置喷水。
技术研发人员:李少伟
受保护的技术使用者:江汉大学
技术研发日:2022.04.06
技术公布日:2022/8/16
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。