技术特征:
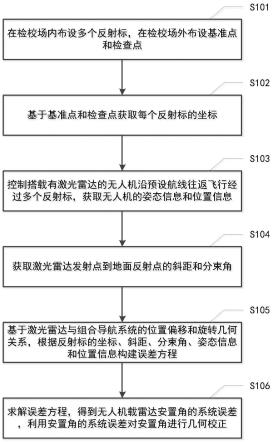
1.一种无人机载雷达安置误差的几何校正方法,包括:在检校场内布设多个反射标,在所述检校场外布设基准点和检查点;基于所述基准点和所述检查点获取每个反射标的坐标;控制搭载有激光雷达的无人机沿预设航线往返飞行经过所述多个反射标,获取所述无人机的姿态信息和位置信息;获取所述激光雷达发射点到地面反射点的斜距和分束角;基于所述激光雷达与组合导航系统的位置偏移和旋转几何关系,根据所述反射标的坐标、所述斜距、所述分束角、所述姿态信息和所述位置信息构建误差方程;求解所述误差方程,得到无人机载雷达安置角的系统误差;利用所述安置角的系统误差对所述安置角进行几何校正。2.根据权利要求1所述的无人机载雷达安置误差的几何校正方法,其中,所述基于所述基准点和所述检查点获取每个反射标的坐标包括:以所述基准点为测站,所述检查点为定向点,采用全站仪分别获取每一个反射标的坐标。3.根据权利要求1所述的无人机载雷达安置误差的几何校正方法,其中,所述获取所述无人机的姿态信息和位置信息包括:在所述基准点架设gps基站;以所述基准点为基站,采用gps后差分进行组合导航解算得到所述姿态信息和所述位置信息。4.根据权利要求1所述的无人机载雷达安置误差的几何校正方法,其中,所述基于所述激光雷达与组合导航系统的位置偏移和旋转几何关系,根据所述斜距、所述分束角、所述姿态信息和所述位置信息构建几何校验模型包括:以所述斜距的距离残差最小为原则构建所述误差方程。5.根据权利要求1所述的无人机载雷达安置误差的几何校正方法,其中,所述误差方程为:其中:其中:
其中,为所述斜距ρ的距离残差,ρ
x
、ρ
y
、ρ
z
分别为所述斜距在wgs-84空间直角坐标系中x、y、z方向的分量,ρ
x0
、ρ
y0
、ρ
z0
分别为ρ
x
、ρ
y
、ρ
z
的初值,为第i个所述反射标在wgs-84空间直角坐标系中的坐标,为第i个所述反射标对应的天线相位中心在wgs-84空间直角坐标系中的坐标,[δx
ai_imu δy
ai_imu δz
ai_imu
]
t
为所述第i个所述反射标对应的激光发射参考中心与惯性单元参考中心的线性偏移量,r
wgs84
为北西高坐标系到wgs-84空间直角坐标系的转换矩阵;r
enu
为北东高坐标系到北西高坐标系的转换矩阵;r
h
为惯性测量单元瞬时方位姿态角旋转矩阵;r
p
为惯性测量单元瞬时俯仰姿态角旋转矩阵;r
r
为惯性测量单元瞬时横滚姿态角旋转矩阵,r
m
为激光发射参考中心与惯性单元参考中心的安置角旋转矩阵,ω、κ分别为方位姿态角、俯仰姿态角及横滚姿态角,α为激光发射光路在本体坐标系xoy面投影与x轴正方向的夹角,β为激光发射光路与其在xoy面的投影线的夹角,dω、dκ分别为ω、κ的修正值,dρ为ρ对应的距离残差的修正值。6.根据权利要求5所述的无人机载雷达安置误差的几何校正方法,其中,所述求解所述误差方程,得到无人机载雷达安置角的系统误差包括:求解小于预设阈值的所述对应的dω、dκ、dρ作为所述安置角的系统误差。7.根据权利要求6所述的无人机载雷达安置误差的几何校正方法,其中,采用迭代求解的方式求解所述误差方程。8.根据权利要求7所述的无人机载雷达安置误差的几何校正方法,其中,所述利用所述安置角的系统误差对所述安置角进行几何校正包括:将当前求解得到的所述dω、dκ、dρ分别累加至前一次求解得到的ω、κ、ρ作为几何校正后的安置角。9.一种无人机载雷达安置误差的几何校正装置,包括:布设模块,用于在检校场内布设多个反射标,在所述检校场外布设基准点和检查点;第一获取模块,用于基于所述基准点和所述检查点获取每个反射标的坐标;第二获取模块,用于控制搭载有激光雷达的无人机沿预设航线往返飞行经过所述多个反射标,获取所述无人机的姿态信息和位置信息;第三获取模块,用于获取所述激光雷达发射点到地面反射点的斜距和分束角;构建模块,用于基于所述激光雷达与组合导航系统的位置偏移和旋转几何关系,根据所述反射标的坐标、所述斜距、所述分束角、所述姿态信息和所述位置信息构建误差方程;计算模块,用于求解所述误差方程,得到无人机载雷达安置角的系统误差;校正模块,用于利用所述安置角的系统误差对所述安置角进行几何校正。
技术总结
本发明提供一种无人机载雷达安置误差的几何校正方法,包括:在检校场内布设多个反射标,在所述检校场外布设基准点和检查点;基于所述基准点和所述检查点获取每个反射标的坐标;控制搭载有激光雷达的无人机沿预设航线往返飞行经过所述多个反射标,获取所述无人机的姿态信息和位置信息;获取所述激光雷达发射点到地面反射点的斜距和分束角;基于所述激光雷达与组合导航系统的位置偏移和旋转几何关系,根据所述反射标的坐标、所述斜距、所述分束角、所述姿态信息和所述位置信息构建误差方程;求解所述误差方程,得到无人机载雷达安置角的系统误差;利用所述安置角的系统误差对所述安置角进行几何校正。角进行几何校正。角进行几何校正。
技术研发人员:腾格尔 吴昊昊 李子扬 周春城 程赛 马灵玲 王宁 李传荣 唐伶俐
受保护的技术使用者:中国科学院空天信息创新研究院
技术研发日:2022.03.28
技术公布日:2022/8/5
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。