技术特征:
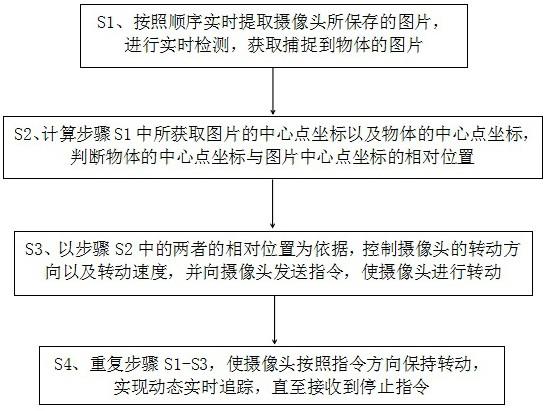
1.一种摄像头动态实时追踪方法,其特征在于:方法如下:通过对摄像头保存的图片进行实时检测,获取捕捉到物体的图片,并通过计算所获取图片的中心点坐标,判断物体中心点坐标与图片中心点坐标的相对位置,以此控制摄像头的转动方向以及转动速度,实现动态实时追踪。2.根据权利要求1所述的一种摄像头动态实时追踪方法,其特征在于:具体方法如下:s1、按照顺序实时提取摄像头所保存的图片,进行实时检测,获取捕捉到物体的图片;s2、计算步骤s1中所获取图片的中心点坐标以及物体的中心点坐标,判断物体的中心点坐标与图片中心点坐标的相对位置;s3、以步骤s2中的两者的相对位置为依据,控制摄像头的转动方向以及转动速度,并向摄像头发送指令,使摄像头进行转动;s4、重复步骤s1-s3,使摄像头按照指令方向保持转动,实现动态实时追踪,直至接收到停止指令。3.根据权利要求2所述的一种摄像头动态实时追踪方法,其特征在于:所述步骤s1中通过摄像头的rtsp流对其所保存的图片进行读取,并通过目标检测网络按照顺序依次进行实时检测。4.根据权利要求2所述的一种摄像头动态实时追踪方法,其特征在于:所述步骤s2中物体的中心点坐标为该物体所在边界框的中心点坐标,为(center_x、center_y);其中,该物体所在边界框的左上角坐标为(x1、y1),右下角坐标为(x2、y2);center_x=(x1 x2)/2center_y=(y1 y2)/2。5.根据权利要求4所述的一种摄像头动态实时追踪方法,其特征在于:所述步骤s3的具体方法如下:s3-1、分别计算物体中心点横坐标与图片中心点横坐标的距离x_gap,以及物体中心点纵坐标与图片中心点纵坐标的距离y_gap,并计算x_gap相对于图片的水平比例x_ratio,以及y_gap相对应图片的垂直比例y_ratio;x_gap=abs(center_x-screen_center_x)y_gap=abs(center_y-screen_center_y)x_ratio=x_gap/screen_xy_ratio=y_gap/screen_y;其中,screen_center_x为图片中心点横坐标,screen_center_y为图片中心点纵坐标,screen_x为图片分辨率的横向点,screen_y为图片分辨率的纵向点;对比x_ratio以及y_ratio的大小,进行水平旋转以及垂直旋转的优先级判断,数值越大,则优先级越高;s3-2、若水平旋转的优先级高于垂直旋转的优先级,则进一步比较物体中心点横坐标center_x是否大于图片中心点横坐标screen_center_x,若大于则向右转,小于则向左转;若垂直旋转的优先级高于水平旋转的优先级,则进一步比较物体中心点纵坐标center_y是否大于图片中心点纵坐标screen_center_y,若大于则向下转,小于则向上转;s3-3、根据x_ratio以及y_ratio所处区间范围,设定摄像头的旋转速度;s3-4、综合步骤s3-1至s3-3的结果,生成摄像头的旋转指令,发送至摄像头控制其旋
转。6.根据权利要求5所述的一种摄像头动态实时追踪方法,其特征在于:所述步骤s3-3中x_ratio以及y_ratio所处区间范围为[0.05,0.5],并且数值越大,摄像头的旋转速度越高。7.根据权利要求6所述的一种摄像头动态实时追踪方法,其特征在于:当x_ratio≤0.15,且y_ratio≤0.15时,向摄像头发送停止指令。
技术总结
本发明提供一种摄像头动态实时追踪方法,通过对摄像头保存的图片进行实时检测,获取捕捉到物体的图片,并通过计算所获取图片的中心点坐标,判断物体中心点坐标与图片中心点坐标的相对位置,以此控制摄像头的转动方向以及转动速度,实现动态实时追踪。本发明针对摄像头提供了一种全新的动态实时追踪方法,通过实时地对摄像头所捕捉图片进行计算分析,及时调整摄像头的旋转方向及旋转速度,达到实时追踪的目的;极大地降低了被监测物体的丢失率,保证摄像头能够随被监测物体进行旋转;针对移动物体能够进行快速响应,跟随其进行旋转,保证了对移动物体的实时追踪效果;可直接适用于现有的各类摄像头,改造成本低廉,具有良好的市场前景。前景。前景。
技术研发人员:丁柏宇辉 王韬
受保护的技术使用者:南京猫头鹰智能科技有限公司
技术研发日:2022.04.01
技术公布日:2022/7/29
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。