技术特征:
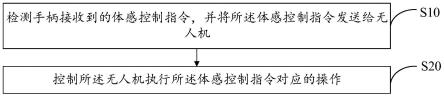
1.一种基于手柄的无人机控制方法,其特征在于,所述基于手柄的无人机控制方法包括以下步骤:检测手柄接收到的体感控制指令,并将所述体感控制指令发送给无人机;控制所述无人机执行所述体感控制指令对应的操作。2.如权利要求1所述的基于手柄的无人机控制方法,其特征在于,所述检测手柄接收到的体感控制指令的步骤包括:通过手柄惯性测量模块检测所述手柄的倾斜角度和倾斜方向;基于所述倾斜方向生成所述无人机的体感方向控制指令;基于所述倾斜角度生成所述无人机的体感速度控制指令。3.如权利要求2所述的基于手柄的无人机控制方法,其特征在于,通过手柄惯性测量模块检测所述手柄的倾斜角度和倾斜方向的步骤包括:通过手柄惯性测量模块测量所述手柄的重力加速度;计算所述重力加速度在x轴和y轴上的分量,得到倾斜方向;根据所述分量和所述重力加速度,计算出倾斜角度。4.如权利要求2所述的基于手柄的无人机控制方法,其特征在于,所述基于所述倾斜角度生成所述无人机的体感速度控制指令的步骤包括:基于预设倾斜角度与速度的映射函数,确认所述倾斜角度对应的速度;基于所述速度生成体感速度控制指令。5.如权利要求2所述的基于手柄的无人机控制方法,其特征在于,所述基于所述倾斜方向生成所述无人机的体感方向控制指令的步骤包括:按照预设对应的关系,基于所述倾斜方向对应生成体感方向控制指令,所述体感方向控制指令包括:俯仰控制指令、横滚控制指令。6.如权利要求2所述的基于手柄的无人机控制方法,其特征在于,所述通过手柄惯性测量模块检测所述手柄的倾斜角度和倾斜方向的步骤包括:通过手柄惯性测量模块获得手柄的第一速度矢量;通过手柄gps模块获得手柄的第二速度矢量;计算得到所述第一速度矢量和所述第二速度矢量之间的误差,基于所述误差修正所述手柄惯性测量模块计算得到的所述第一速度矢量;基于所述第一速度矢量计算得到倾斜角度和倾斜方向。7.如权利要求1所述的基于手柄的无人机控制方法,其特征在于,所述控制所述无人机执行所述体感控制指令对应的操作的步骤包括:控制所述无人机生成所述体感控制指令对应的控制信号;将所述控制信号发送给无人机的电子调速器,通过所述电子调速器实现对无人机的控制。8.一种基于手柄的无人机控制装置,其特征在于,所述基于手柄的无人机控制装置包括:检测模块,用于检测手柄接收到的体感控制指令,并将所述体感控制指令发送给无人机;执行模块,用于控制所述无人机执行所述体感控制指令对应的操作。
9.一种基于手柄的无人机控制设备,其特征在于,所述基于手柄的无人机控制设备包括:存储器、处理器及存储在所述存储器上并可在所述处理器上运行的基于手柄的无人机控制程序,所述基于手柄的无人机控制程序被所述处理器执行时实现如权利要求1至7中任一项所述的基于手柄的无人机控制方法的步骤。10.一种可读存储介质,其特征在于,所述可读存储介质上存储有基于手柄的无人机控制程序,所述基于手柄的无人机控制程序被处理器执行时实现如权利要求1至7中任一项所述的基于手柄的无人机控制方法的步骤。
技术总结
本发明涉及无人机技术领域,尤其涉及基于手柄的无人机控制方法、装置、设备与可读存储介质。基于手柄的无人机控制方法包括:检测手柄接收到的体感控制指令,并将所述体感控制指令发送给无人机,控制所述无人机执行所述体感控制指令对应的操作。本发明通过检测体感操作的信号,处理生成控制无人机飞行姿态的体感控制指令,然后将体感控制指令发送给无人机,控制无人机执行体感控制指令对应的操作,实现通过手柄模拟体感操作,对无人机进行控制,通过手柄的体感操作能够提高控制操作的便捷性,并且能解决手机操控不准确的问题,提高无人机体感控制的准确性。感控制的准确性。感控制的准确性。
技术研发人员:宋杨政 董杰 郭亮 王劲
受保护的技术使用者:浙江吉利控股集团有限公司
技术研发日:2022.04.01
技术公布日:2022/7/29
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。