技术特征:
1.一种基于单轴mems条纹投影的手臂三维测量方法,其特征在于,包括以下步骤:构建用于手臂三维测量的三维测量系统,其中,所述三维测量系统由单轴mems投影仪及其相机模组构成;获取所述三维测量系统采集的三频四步条纹结构光图像,通过多频外差的方法进行相位展开,获取相位图像;标定所述相机模组的内外参数,获取成像平面的物理位置信息;基于所述物理位置信息和所述相位图像,获取具有高度属性特征的相位数据,并通过逆线性理论生成相位高度映射参数;采集手臂的三频四步变形条纹图像,根据所述相位高度映射参数,获取所述三频四步变形条纹图像的调制相位的高度数值;基于所述高度数值,获取所述手臂的不同部位的像素矫正偏移量,生成手臂三维点云数据。2.根据权利要求1所述一种基于单轴mems条纹投影的手臂三维测量方法,其特征在于:在标定所述相机模组的内外参数的过程中,固定所述相机模组的焦距,将标定板放置在不同的空间位置,采集图像不低于25张,利用张正友标定法获取所述相机模组的内参矩阵、径向畸变和切向畸变参数,并进行畸变矫正;将所述标定板固定在工作台面上,通过所述相机模组采集不低于5张图像,利用张正友标定法,获取所述相机模组的外参旋转矩阵和平移矩阵。3.根据权利要求2所述一种基于单轴mems条纹投影的手臂三维测量方法,其特征在于:在获取成像平面的物理位置信息的过程中,构建理想成像平面方程,其中,理想成像平面距离相机光心距离为1mm,在相机坐标下的方程为zc=1;基于相机成像原理,获取每个像素映射到所述理想成像平面的空间坐标;根据所述外参旋转矩阵和所述平移矩阵,拟合工作台面位于相机坐标系下的平面方程:ax by cz d=0,并构造每个像素和理想成像平面上的映射坐标的光路方程:基于所述平面方程和所述光路方程,构建用于表示所述成像平面的所述物理位置信息的空间坐标信息方程:其中,(p
ix
,p
iy
,p
iz
)和(p
rx
,p
ry
,p
rz
)分别是理想平面pi和实际成像平面p
r
上面的点;(p
x
,p
y
)为像素坐标系下的像素坐标;f
x
和f
y
为相机的两个方向上的焦距;a、b、c、d为空间平面方程参数。4.根据权利要求3所述一种基于单轴mems条纹投影的手臂三维测量方法,其特征在于:在生成相位高度映射参数的过程中,通过控制所述工作台面,采集位于0mm、10mm、
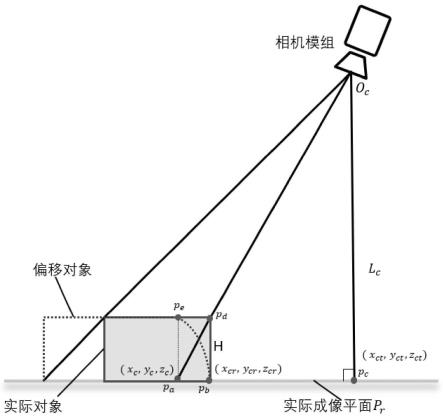
20mm、30mm、40m、50mm、60mm、70mm、80mm、90mm处的所述三频四步相移条纹图像;通过多频外差的方法进行相位展开,将10-90mm的展开相位图像均与0mm展开相位图像作差,获得10-90mm高度的相位差图像;将10-90mm相位差图像对应已知实际物理高度,运用逆线性的方法拟合出每个像素处的所述相位高度映射参数,其中,拟合方法为:其中,a、b表示相位高度映射参数,h(x,y)为测量对象的实际真实高度;为高度调制产生的相位差。5.根据权利要求4所述一种基于单轴mems条纹投影的手臂三维测量方法,其特征在于:在生成手臂三维点云数据的过程中,所述相机模组成像平面之间的实际物理距离,以及相机光心投影到成像平面的坐标点,生成每个像素映射到成像平面上的坐标与所述坐标点之间的矢量关系;根据相机成像原理,基于所述相位高度映射参数、所述实际物理距离、所述矢量关系之间的几何关系,获取像素成像坐标偏移矫正后的实际空间坐标;基于所述实际空间坐标的x、y轴坐标数据,并将所述实际物理距离作为z轴坐标数值,生成所述手臂三维点云数据。6.根据权利要求5所述一种基于单轴mems条纹投影的手臂三维测量方法,其特征在于:在生成矢量关系的过程中,所述矢量关系的表达式为:其中,p
a
(x
c
,y
c
,z
c
)和p
b
(x
cr
,y
cr
,z
cr
)分别为p
e
和p
d
在真实成像板p
r
上的投影点;p
c
(x
ct
,y
ct
,z
ct
)为相机光学中心o
c
与真实成像板p
r
之间的垂直点;l
c
为o
c
与平板p
r
之间的距离;p
f
(x
f
,y
f
,z
f
)是p
r
上的一点,与p
a
和p
c
不共线。7.根据权利要求6所述一种基于单轴mems条纹投影的手臂三维测量方法,其特征在于:在生成所述手臂三维点云数据的过程中,所述手臂三维点云数据的表达式为:
8.根据权利要求7所述一种基于单轴mems条纹投影的手臂三维测量方法,其特征在于:用于实现所述手臂三维测量方法的手臂三维测量系统,包括:第一数据采集与预处理模块,用于获取所述三维测量系统采集的三频四步条纹结构光图像,通过多频外差的方法进行相位展开,获取相位图像;第一数据处理模块,用于标定所述相机模组的内外参数,获取成像平面的物理位置信息;第二数据处理模块,用于基于所述物理位置信息和所述相位图像,获取具有高度属性特征的相位数据,并通过逆线性理论生成相位高度映射参数;第二数据采集与预处理模块,用于采集手臂的三频四步变形条纹图像,根据所述相位高度映射参数,获取所述三频四步变形条纹图像的调制相位的高度数值;三维点云数据生成模块,用于基于所述高度数值,获取所述手臂的不同部位的像素矫正偏移量,生成手臂三维点云数据。
技术总结
本发明公开了一种基于单轴MEMS条纹投影的手臂三维测量方法,包括以下步骤:构建用于手臂三维测量的由单轴MEMS投影仪及其相机模组构成的三维测量系统;获取三维测量系统采集的三频四步条纹结构光图像,通过多频外差的方法进行相位展开,获取相位图像;标定相机模组的内外参数,获取成像平面的物理位置信息;基于物理位置信息和相位图像,获取具有高度属性特征的相位数据,并通过逆线性理论生成相位高度映射参数;采集手臂的三频四步变形条纹图像,根据相位高度映射参数,获取三频四步变形条纹图像的调制相位的高度数值;基于高度数值,获取手臂的像素矫正偏移量,生成手臂三维点云数据;本发明能够满足较多的消费应用场景的需求。的需求。的需求。
技术研发人员:王怀智 刘艺超 吴婷 张弦
受保护的技术使用者:深圳粒子群智能科技有限公司
技术研发日:2022.04.14
技术公布日:2022/7/29
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。