技术特征:
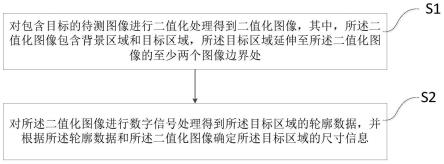
1.一种目标测量方法,其特征在于,包括:对包含目标的待测图像进行二值化处理得到二值化图像,其中,所述二值化图像包含背景区域和目标区域,所述目标区域延伸至所述二值化图像的至少两个图像边界处;对所述二值化图像进行数字信号处理得到所述目标区域的轮廓数据,并根据所述轮廓数据和所述二值化图像确定所述目标区域的尺寸信息。2.根据权利要求1所述的方法,其特征在于,所述对包含目标的待测图像进行二值化处理得到二值化图像包括:利用已训练的burrito-net网络对所述待测图像进行二值化处理;所述利用已训练的burrito-net网络对所述待测图像进行二值化处理进一步包括:将所述包含目标的待测图像输入burrito-net网络的堆叠层,所述堆叠层将所述待测图像进行拆分和填充后得到多通道特征图,所述多通道特征图包括多个依次堆叠的待测图像的行图像块;将所述堆叠层输出的所述多通道特征图输入burrito-net网络的提取层,所述提取层将所述多通道特征图进行卷积提取并输出多层特征图;将所述堆叠层输出的所述多层特征图输入burrito-net网络的扩展层,所述扩展层将所述多层特征图进行扩展得到所述二值化图像。3.根据权利要求1所述的方法,其特征在于,所述堆叠层将所述待测图像进行拆分和填充后得到多通道特征图进一步包括:依次遍历所述待测图像的每一行的行图像;将每一所述行图像的像素值依次填充到预设边长的图像块,其中,所述图像块中未填充的像素值为0;将全部填充后的所述行图像的图像块进行堆叠以生成多通道特征图。4.根据权利要求3所述的方法,其特征在于,所述提取层包括:第一卷积神经网络,所述第一卷积神经网络包括至少两个串联的第一卷积神经网络模块;与所述第一卷积神经网络串联的残差网络,所述残差网络包括多个串联的残差模块;与所述残差网络串联的第二卷积神经网络,所述第二卷积神经网络包括至少两个串联的第二卷积神经网络模块。5.根据权利要求3或4所述的方法,其特征在于,所述扩展层将所述多层特征图进行扩展得到所述二值化图像进一步包括:将所述多层特征图的每一层的单层特征图解码得到所述全部填充后的所有行图像的图像块;将所述全部填充后的所有行图像的图像块分别扩展为所述待测图像的每一行的行图像;堆叠所述每一行的行图像以生成所述二值化图像。6.根据权利要求1所述的方法,其特征在于,对包含目标的待测图像进行二值化处理得到二值化图像还包括:利用已训练的u-net网络对所述待测图像进行二值化处理。7.根据权利要求1~6中任一项所述的方法,其特征在于,所述对所述二值化图像进行数字信号处理得到所述目标区域的轮廓数据,并根据所述轮廓数据和所述二值化图像确定所述目标区域的尺寸信息进一步包括:
s21、查找所述二值化图像中的目标区域的轮廓以得到所述目标区域的轮廓数据;s22、对所述轮廓数据进行分类,以得到位于所述目标区域的第一边界的第一轮廓数据和位于所述目标区域的第二边界的第二轮廓数据,其中,所述目标区域延伸至所述二值化图像的图像边界处的轮廓形成所述第一边界和平行于所述第一边界的所述第二边界;s23、根据第一轮廓数据和第二轮廓数据确定所述目标区域的尺寸信息。8.根据权利要求7所述的方法,其特征在于,所述根据第一轮廓数据和第二轮廓数据确定所述目标区域的尺寸信息进一步包括:对第一轮廓数据和第二轮廓数据进行插值,使得插值后的第一边界的第一轮廓数据一一对应于插值后的第二边界的第二轮廓数据;分别计算对应的第一轮廓数据和第二轮廓数据之间的第二距离,以得到包括多个第二距离的第二距离集;根据所述第二距离集中的最大第二距离、最小第二距离以及平均第二距离确定所述目标区域的尺寸信息。9.根据权利要求1~6中任一项所述的方法,其特征在于,所述对所述二值化图像进行数字信号处理得到所述目标区域的轮廓数据,并根据所述轮廓数据和所述二值化图像确定所述目标区域的尺寸信息进一步包括:将所述二值化图像分别进行膨胀和腐蚀运算处理;根据膨胀的二值化图像和腐蚀的二值化图像得到位于所述目标区域的第三边界的第三轮廓数据和位于所述目标区域的第四边界的第四轮廓数据,其中,所述目标区域延伸至所述二值化图像的图像边界处的轮廓形成所述第三边界和平行于所述第三边界的所述第四边界;对所述第三轮廓数据和第四轮廓数据中的一个进行拟合以得到基准斜率,并根据所述基准斜率对另一个轮廓数据进行拟合,从而根据拟合后的另一个轮廓数据确定所述目标区域的尺寸信息。10.根据权利要求9中任一项所述的方法,其特征在于,对所述第三轮廓数据和第四轮廓数据中的一个进行拟合以得到基准斜率,并根据所述基准斜率对另一个轮廓数据进行拟合,从而根据拟合后的另一个轮廓数据确定所述目标区域的尺寸信息包括:选择所述第三轮廓数据或者第四轮廓数据中的一个拟合后得到线性的第三边界或第四边界,所述拟合后得到线性的先拟合的第三边界或先拟合的第四边界的斜率为基准斜率;利用所述基准斜率对所述第三轮廓数据或者第四轮廓数据中的另一个进行拟合以得到后拟合的第四边界或后拟合的第三边界;根据先拟合的第三边界和后拟合的第四边界或者先拟合的第四边界和后拟合的第三边界之间的第三距离、以及根据后拟合的第四边界或者后拟合的第三边界对应的轮廓数据确定所述目标区域的尺寸信息。11.根据权利要求1~6中任一项所述的方法,其特征在于,所述对所述二值化图像进行数字信号处理得到所述目标区域的轮廓数据,并根据所述轮廓数据和所述二值化图像确定所述目标区域的尺寸信息进一步包括:将所述二值化图像分别进行膨胀和腐蚀运算处理;
根据膨胀的二值化图像和腐蚀的二值化图像得到位于所述目标区域的第五边界的第五轮廓数据和位于所述目标区域的第六边界的第六轮廓数据,其中,所述目标区域延伸至所述二值化图像的图像边界处的轮廓形成所述第五边界和平行于所述第五边界的所述第六边界;分别拟合所述第五轮廓数据和第六轮廓数据,并根据拟合后的第五轮廓数据、拟合后的第六轮廓数据、以及根据二值化图像中的像素值变化确定所述目标区域的尺寸信息。12.根据权利要求11所述的方法,其特征在于,所述分别拟合所述第五轮廓数据和第六轮廓数据,并根据拟合后的第五轮廓数据、拟合后的第六轮廓数据、以及根据二值化图像中的像素值变化确定所述目标区域的尺寸信息进一步包括:分别拟合所述第五轮廓数据以及第六轮廓数据,以得到线性的第五边界和第六边界;根据所述第五边界或所述第六边界的斜率对所述二值化图像进行旋转;逐行扫描旋转后的所述二值化图像,根据二值化图像中的像素值变化确定所述目标区域的尺寸信息。13.一种执行权利要求1~12中任一项方法的目标检测装置,其特征在于,所述装置包括:待测图像处理模块,用于对包含目标的待测图像进行二值化处理得到二值化图像,其中,所述二值化图像包含背景区域和目标区域,所述目标区域延伸至所述二值化图像的至少两个图像边界处;尺寸信息确定模块,用于对所述二值化图像进行数字信号处理得到所述目标区域的轮廓数据,并根据所述轮廓数据和所述二值化图像确定所述目标区域的尺寸信息。14.一种计算机可读存储介质,其上存储有计算机程序,其特征在于,该程序被处理器执行时实现如权利要求1~12中任一项所述的方法。15.一种计算机设备,包括存储器、处理器及存储在存储器上并可在处理器上运行的计算机程序,其特征在于,所述处理器执行所述程序时实现如权利要求1~12中任一所述的方法。
技术总结
本发明实施例公开一种目标测量方法及装置、计算机设备及介质。在一具体实施方式中,该目标测量方法包括:对包含目标的待测图像进行二值化处理得到二值化图像,其中,所述二值化图像包含背景区域和目标区域,所述目标区域延伸至所述二值化图像的至少两个图像边界处;对所述二值化图像进行数字信号处理得到所述目标区域的轮廓数据,并根据所述轮廓数据和所述二值化图像确定所述目标区域的尺寸信息。二值化图像确定所述目标区域的尺寸信息。二值化图像确定所述目标区域的尺寸信息。
技术研发人员:魏书琪 哈谦 姜博然 冀潮 欧歌 钟楚千 王友学 侯孟军
受保护的技术使用者:京东方科技集团股份有限公司
技术研发日:2022.03.28
技术公布日:2022/7/15
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。