技术特征:
1.一种基于分层学习和潜在风险模型的多车轨迹预测系统,其特征在于,包括:基于条件变分编码器的候选轨迹生成模块、基于潜在风险模型的指导轨迹生成模块以及再学习模块,其中:候选轨迹生成模块根据周围车辆方向盘、油门和刹车,分别对周围每台车辆生成可行驶的候选轨迹;指导轨迹生成模块根据当前周围车辆的位置信息、速度信息以及道路与车道线信息建立潜在风险势场,进而利用风险势场计算每条候选轨迹的潜在风险值,根据潜在风险值为候选轨迹计算周围每台车辆的可能行驶概率并随机选择周围每台车辆的未来指导轨迹;再学习模块融合车辆历史轨迹和未来指导轨迹,最终得到周围每台车辆的未来预测行驶轨迹。2.根据权利要求1所述的基于分层学习和潜在风险模型的多车轨迹预测系统,其特征是,所述的可行驶的候选轨迹,通过以下方式生成:条件变分编码器利用采集到的周围每台车辆自然驾驶数据训练编码器和解码器,再利用编码器生成表征车辆历史轨迹和未来行驶轨迹潜在关系的条件概率分布,并在该条件概率分布中进行多次随机采集,最后将随机采样值和周边车辆的历史轨迹输入到解码器中,得到周围每台车辆的初步预测轨迹作为可能行驶的候选轨迹。3.根据权利要求1所述的基于分层学习和潜在风险模型的多车轨迹预测系统,其特征是,所述的潜在风险模型,即车辆、道路和车道线之间交互的统一风险表征势场e
u
=e
l
e
r
e
v
e
s
,其中:e
l
为考虑车道线对车辆轨迹约束作用的车道线风险势场,e
r
为考虑道路对车辆轨迹约束作用的道路风险势场,e
v
为基于碰撞风险的考虑车车之间交互的车辆风险势场,e
s
为考虑车辆自身惯性的速度风险势场。4.根据权利要求1~3中任一所述的基于分层学习和潜在风险模型的多车轨迹预测系统,其特征是,所述的基于条件变分编码器的候选轨迹生成模块包括:编码器单元和解码器单元,其中:编码器包括两个通道,每个通道由全连接层和长短时记忆网络层组成,编码器单元根据周边车辆历史轨迹序列信息x和未来真实轨迹序列信息y,利用全连接层和lstm网络进行处理,得到两条通道的隐藏层信息,将两个通道的信息融合后通过一个全连接层得到条件概率分布z~p(z|x,y)的均值μ(x,y)和方差σ2(x,y)。5.根据权利要求4所述的基于分层学习和潜在风险模型的多车轨迹预测系统,其特征是,所述的解码器包括:两个通道,其中:第一通道通过全连接层处理隐藏状态信息z,第二通道包含全连接层和长短时记忆网络层用来处理输入信息x,全连接层和长短时记忆网络层通过融合两个通道的信息,得到车辆可能行驶的候选轨迹位置序列信息。6.根据权利要求1~3中任一所述的基于分层学习和潜在风险模型的多车轨迹预测系统,其特征是,所述的基于潜在风险模型的指导轨迹生成模块包括:潜在风险势场单元、轨迹概率分配单元和随机选择单元,其中:潜在风险势场单元根据当前输入信息x生成潜在风险势场e
u
=e
l
e
r
e
v
e
s
;轨迹概率分配单元将候选轨迹y
c
投影到风险势场中,计算每条候选轨迹的潜在风险值e
u
(y
c
),并根据潜在风险值给候选轨迹分配周边车辆可能行驶的概率其中n
c
是候选轨迹的数量;随机选择单元通过随机选择得到每台车辆的未来指导轨迹y
g
。7.根据权利要求1所述的基于分层学习和潜在风险模型的多车轨迹预测系统,其特征
是,所述的再学习模块,包括:三个全连接层和两个lstm层,其中:第一全连接层根据周围车辆时间周期t
h
内历史轨迹序列信息,得到基础运动特征信息并输入第一lstm层得到最后时刻隐藏层的深度特征输出同时,利用第二全连接层处理指导轨迹生成模块中生成的未来指导轨迹的序列,得到指导轨迹序列的指导信息特征;将最后时刻隐藏层的深度特征输出指导信息特征同时输入第二lstm层,得到第二lstm所有时刻隐藏单元信息并输入第三全连接层中,得到预测周期t
f
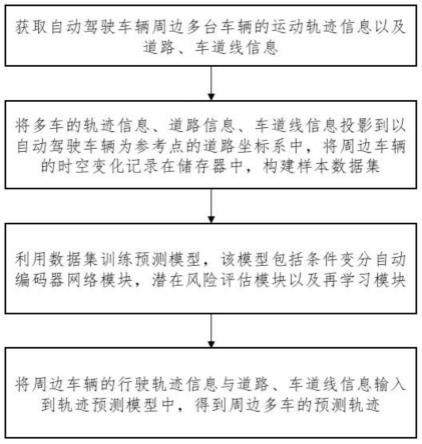
内预测轨迹序列信息。8.根据权利要求1~7中任一所述系统的基于分层学习和潜在风险模型的多车轨迹预测方法,其特征在于,包括:a、基于自动驾驶车辆当前位置,获取周边存在的多台车辆的行驶轨迹信息,获取道路曲率、宽度信息;获取车道线类型、曲率、宽度信息;b、将多车行驶轨迹信息、道路信息以及车道线宽度信息投影至道路坐标系中,并保持同一要素在感知范围内存在时具有唯一身份标号,即id信息;将上述信息在投影坐标空间中的时空变化记录在储存器中,构建多车轨迹预测训练数据集;c、基于多车轨迹预测中的不确定性和交互影响两方面,设计神经网络结构,构建轨迹预测模型;将上述数据集输入到预测模型中,完成多车轨迹预测模型的训练与优化;d、根据自动驾驶车辆感知到的环境信息,利用上述多车轨迹预测模型预测周边车辆的运动轨迹。
技术总结
一种基于分层学习和潜在风险模型的多车轨迹预测系统,包括:基于条件变分编码器的候选轨迹生成模块、基于潜在风险模型的指导轨迹生成模块以及再学习模块,候选轨迹生成模块根据周围车辆方历史轨迹序列信息,分别对周围每台车辆生成可行驶的候选轨迹;指导轨迹生成模块根据当前周围车辆的位置信息、速度信息以及道路与车道线信息建立潜在风险势场,进而利用风险势场计算每条候选轨迹的潜在风险值,根据潜在风险值为候选轨迹计算周围每台车辆的可能行驶概率并随机选择周围每台车辆的未来指导轨迹;再学习模块融合车辆历史轨迹和未来指导轨迹,得到周围每台车辆的未来行驶轨迹,本发明显著提高多车轨迹预测的精度,实现多车轨迹的准确预测。迹的准确预测。迹的准确预测。
技术研发人员:王亚飞 刘旭磊 王凯正 周志松 殷承良
受保护的技术使用者:上海交通大学
技术研发日:2022.01.13
技术公布日:2022/6/28
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。