技术特征:
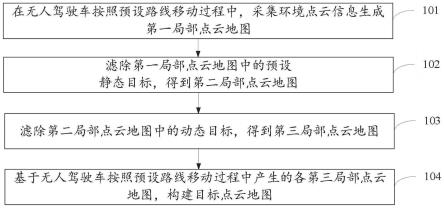
1.一种点云地图构建方法,其特征在于,所述方法包括:在无人驾驶车按照预设路线移动过程中,采集环境点云信息生成第一局部点云地图;滤除所述第一局部点云地图中的预设静态目标,得到第二局部点云地图;滤除所述第二局部点云地图中的动态目标,得到第三局部点云地图;基于所述无人驾驶车按照所述预设路线移动过程中产生的各所述第三局部点云地图,构建目标点云地图。2.根据权利要求1所述的方法,其特征在于,所述在无人驾驶车按照预设路线移动过程中,采集环境点云信息生成第一局部点云地图的步骤,包括:在所述无人驾驶车按照预设路线移动过程中,所述无人驾驶车上安装的激光雷达基于发射、接收的脉冲信号的时间间隔,确定与周围环境中各对象之间的距离,作为采集的环境点云信息;基于所采集的各环境点云信息生成第一局部点云地图,其中,所述第一局部点云地图用于表征在某一时刻所述无人驾驶车周围的环境信息。3.根据权利要求1所述的方法,其特征在于,滤除所述第一局部点云地图中的预设静态目标,得到第二局部点云地图的步骤,包括:对所述第一局部点云地图进行目标分割处理,得到第一局部点云地图中包含的各对象,然后对各所述对象进行标色处理,其中,每个对象对应多个点云信息,每个点云信息对应一个距离值,在进行标色时基于预先设定的颜色与距离之间的对应关系,对所述第一局部点云地图中包含的各所述对象进行标色;滤除标色后的各所述对象中的预设静态目标,得到第二局部点云地图。4.根据权利要求1所述的方法,其特征在于,滤除所述第二局部点云地图中的动态目标,得到第三局部点云地图的步骤,包括:基于先后两次采集的第一局部点云地图中的点云信息,确定动态目标;滤除所述第二局部点云地图中的动态目标,得到第三局部点云地图。5.根据权利要求4所述的方法,其特征在于,基于先后两次采集的第一局部点云地图中的点云信息,确定动态目标的步骤,包括:间隔预设时长后,再次采集环境点云信息生成第一局部点云地图,并滤除第一局部点云地图中的静态目标,得到第四局部点云地图;确定先后两次采集第一局部点云地图时,所述无人驾驶车的位置变化信息;根据所述位置变化信息对所述第四局部点云地图中包含的各对象的点云信息进行更新,得到第五局部点云地图;比对所述第五局部点云地图和所述第二局部点云地图,将点云信息变化量处于预设范围外的对象,确定为动态目标。6.一种点云地图构建装置,其特征在于,包括:采集模块,用于在无人驾驶车按照预设路线移动过程中,采集环境点云信息生成第一局部点云地图;第一滤除模块,用于滤除所述第一局部点云地图中的预设静态目标,得到第二局部点云地图;第二滤除模块,用于滤除所述第二局部点云地图中的动态目标,得到第三局部点云地
图;构建模块,用于基于所述无人驾驶车按照所述预设路线移动过程中产生的各所述第三局部点云地图,构建目标点云地图。7.根据权利要求6所述的装置,其特征在于,所述采集模块包括:第一子模块,用于在所述无人驾驶车按照预设路线移动过程中,所述无人驾驶车上安装的激光雷达基于发射、接收的脉冲信号的时间间隔,确定与周围环境中各对象之间的距离,作为采集的环境点云信息;第二子模块,用于基于所采集的各环境点云信息生成第一局部点云地图,其中,所述第一局部点云地图用于表征在某一时刻所述无人驾驶车周围的环境信息。8.根据权利要求6所述的装置,其特征在于,所述第一滤除模块包括:第三子模块,用于对所述第一局部点云地图进行目标分割处理,得到第一局部点云地图中包含的各对象,然后对各所述对象进行标色处理,其中,每个对象对应多个点云信息,每个点云信息对应一个距离值,在进行标色时基于预先设定的颜色与距离之间的对应关系,对所述第一局部点云地图中包含的各所述对象进行标色;第四子模块,用于滤除标色后的各所述对象中的预设静态目标,得到第二局部点云地图。9.根据权利要求6所述的装置,其特征在于,所述第二滤除模块包括:第五子模块,用于基于先后两次采集的第一局部点云地图中的点云信息,确定动态目标;第六子模块,用于滤除所述第二局部点云地图中的动态目标,得到第三局部点云地图。10.根据权利要求9所述的装置,其特征在于,所述第五子模块包括:采集单元,用于间隔预设时长后,再次采集环境点云信息生成第一局部点云地图,并滤除第一局部点云地图中的静态目标,得到第四局部点云地图;位置变化信息确定单元,用于确定先后两次采集第一局部点云地图时,所述无人驾驶车的位置变化信息;更新单元,用于根据所述位置变化信息对所述第四局部点云地图中包含的各对象的点云信息进行更新,得到第五局部点云地图;比对单元,用于比对所述第五局部点云地图和所述第二局部点云地图,将点云信息变化量处于预设范围外的对象,确定为动态目标。11.一种电子设备,包括处理器、存储器及存储在所述存储器上并可在所述处理器上运行的程序或指令,所述程序或指令被所述处理器执行时实现如权利要求1-5任一项所述的点云地图构建方法的步骤。
技术总结
本申请公开了点云地图构建方法、装置及电子设备,属于点云地图构建技术领域,所述方法包括:在无人驾驶车按照预设路线移动过程中,采集环境点云信息生成第一局部点云地图;滤除第一局部点云地图中的预设静态目标,得到第二局部点云地图;滤除第二局部点云地图中的动态目标,得到第三局部点云地图;基于无人驾驶车按照预设路线移动过程中产生的各第三局部点云地图,构建目标点云地图。通过本申请公开的点云地图构建方案,能够滤除点云地图中的动态目标和参考价值较小的静态目标,得到高质量的点云地图,使得后续定位时得到更精准的位置信息。息。息。
技术研发人员:宋涛 马亚龙 霍向 吴新开
受保护的技术使用者:北京洛必德科技有限公司
技术研发日:2022.03.30
技术公布日:2022/6/21
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。