技术特征:
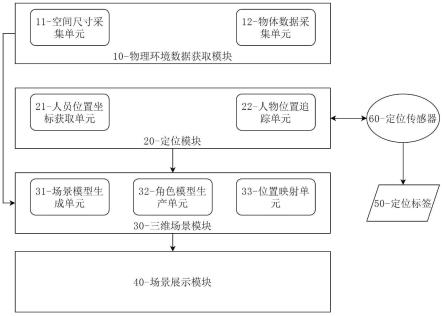
1.基于uwb定位技术的三维可视化系统,其特征在于,包括:物理环境数据获取模块、定位模块、三维场景模块、场景展示模块、定位标签和定位传感器;所述物理环境数据获取模块,用于获取定位区域的信息;所述定位模块,用于根据定位传感器检测定位标签的数据进行分析获取定位区域人员的位置信息,还用于对定位区域人员的位置和运动状态进行追踪,得到运动数据;所述三维场景模块,用于根据所述物理环境数据获取模块获取的定位区域的信息构建对应的虚拟三维场景,所述三维场景模块还用于生成角色模型,并根据所述定位模块得到运动数据驱动角色模型运动;所述场景展示模块,用于展示所述三维场景模块构建的虚拟三维场景和虚拟三维场景中的角色模型及其运动状态。2.如权利要求1所述的基于uwb定位技术的三维可视化系统,其特征在于,所述定位区域的信息包括定位区域的空间尺寸和物体数据。3.如权利要求1所述的基于uwb定位技术的三维可视化系统,其特征在于,所述定位模块的运动数据包括人员的位置数据和运动状态数据。4.如权利要求2所述的基于uwb定位技术的三维可视化系统,其特征在于,所述物理环境数据获取模块包括空间尺寸采集单元和物体数据采集单元,所述空间尺寸采集单元用于获取定位区域空间结构的尺寸数据,所述物体数据采集单元用于获取定位空间内部全部物体的数据。5.如权利要求4所述的基于uwb定位技术的三维可视化系统,其特征在于,所述物体的数据包括物体的形状、尺寸和图像数据。6.如权利要求4所述的基于uwb定位技术的三维可视化系统,其特征在于,所述定位模块包括人员位置坐标获取单元和人物位置追踪单元,所述人员位置坐标获取单元用于根据设置在定位区域的所述定位传感器读取到人员身上的定位标签后,通过分析,得到位于定位区域人员的坐标,所述人物位置追踪单元用于根据所述人员位置坐标获取单元获取的坐标,对人员的位置和运动状态进行追踪,得到运动数据。7.如权利要求6所述的基于uwb定位技术的三维可视化系统,其特征在于,所述三维场景模块包括场景模型生成单元、角色模型生产单元和位置映射单元,所述场景模型生成单元用于所述空间尺寸采集单元和所述物体数据采集单元采集的数据生成与物理环境定位区域1:1对应的虚拟三维场景,所述角色模型生产单元用于生成角色模型,所述位置映射单元用于根据人物位置追踪单元得到的运动数据驱动角色模型在虚拟三维场景中运动。8.如权利要求7所述的基于uwb定位技术的三维可视化系统,其特征在于,所述角色模型在所述虚拟三维场景中的位置和运动状态与物理环境定位区域中人员的位置和运动状态一致。9.基于uwb定位技术的三维可视化方法,应用如权利要求1-8任一的基于uwb定位技术的三维可视化系统,其特征在于,包括以下步骤:s1,物理环境数据获取,空间尺寸采集单元获取定位区域空间结构的尺寸数据,物体数据采集单元获取定位空间内部全部物体的数据;s2,定位区域人员定位,人员位置坐标获取单元根据设置在定位区域的定位传感器读取到人员身上的定位标签后,通过分析,得到位于定位区域人员的坐标,人物位置追踪单元
根据人员位置坐标获取单元获取的坐标,对人员的位置和运动状态进行追踪,得到运动数据;s3,虚拟场景生成,场景模型生成单元空间尺寸采集单元和物体数据采集单元采集的数据生成与物理环境定位区域1:1对应的虚拟三维场景;s4,角色模型生成驱动,角色模型生产单元生成角色模型,位置映射单元根据人物位置追踪单元得到的运动数据驱动角色模型在虚拟三维场景中运动;s5,场景展示,场景展示模块展示三维场景模块构建的虚拟三维场景和虚拟三维场景中的角色模型及其运动状态。
技术总结
基于UWB定位技术的三维可视化系统和方法,涉及uwb定位技术技术领域,包括:物理环境数据获取模块、定位模块、三维场景模块、场景展示模块、定位标签和定位传感器,通过采用UWB定位技术获取定位区域人员的位置,并生成与定位区域对应的虚拟三维场景和角色模型,将获取的人员的位置与角色模型进行映射后驱动角色模型在虚拟三维场景内部运动,达到了将2D形式的展示转化为3D形式进行展示,观察者可以实时查看现场的状况同时能还原真实的场景,便于观察者观察目标的效果。者观察目标的效果。者观察目标的效果。
技术研发人员:周安斌 晏武志 张泽昊
受保护的技术使用者:山东金东数字创意股份有限公司
技术研发日:2022.01.21
技术公布日:2022/6/10
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。