技术特征:
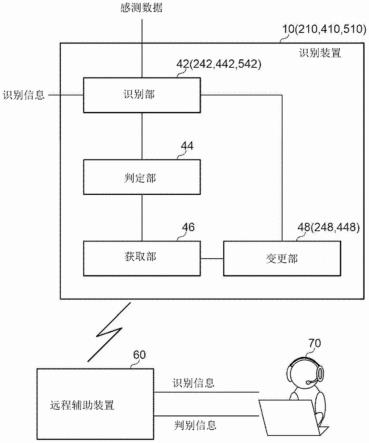
1.一种识别装置(10、210、310、410、510),包括:识别部(42、242、342、442、542),识别存在于本车辆(30)的行进方向上的对象物(74)以及上述对象物的移动预测范围(76);判定部(44),基于上述识别部的识别结果来判定上述本车辆的前进道路是否被上述对象物堵塞;获取部(46、346),在由上述判定部判定为上述前进道路被堵塞的情况下,从操作人员(70)获取表示上述对象物是移动物还是静止物的信息;以及变更部(48、248、448),基于由上述获取部获取的信息来变更由上述识别部识别出的上述移动预测范围。2.根据权利要求1所述的识别装置,其中,在由上述获取部获取的信息表示上述对象物是静止物的情况下,上述变更部以缩小上述移动预测范围的方式进行变更。3.根据权利要求2所述的识别装置(10、310、410、510),其中,上述识别部(42、342、442、542)将行人识别为上述对象物,在由上述获取部获取的信息表示上述对象物是静止物的情况下,上述变更部以减小上述移动预测范围的半径的方式进行变更。4.根据权利要求3所述的识别装置(410),其中,上述识别部(442)识别作为上述对象物的上述行人的种类,上述变更部(448)在以减小上述移动预测范围的半径的方式进行变更的情况下,根据上述行人的种类而使减小的程度不同。5.根据权利要求3或4所述的识别装置(510),其中,上述识别部(542)将存在于人行横道的位置的行人识别为上述对象物。6.根据权利要求1~5中任意一项所述的识别装置(210),其中,上述识别部(242)将两轮车识别为上述对象物,在由上述获取部获取的信息表示上述对象物是静止物的情况下,上述变更部(248)以减小上述对象物的直行方向的上述移动预测范围的宽度,且增大与上述直行方向正交的方向的上述移动预测范围的宽度的方式进行变更。7.根据权利要求1~6中任意一项所述的识别装置(310),其中,上述识别部(342)识别表示上述本车辆周边的状况的场景,上述获取部(346)根据由上述识别部识别出的场景来决定是否从上述操作人员获取信息。8.根据权利要求7所述的识别装置(310),其中,当在由上述识别部再次识别出与获取了来自上述操作人员的信息的上述对象物相同的对象物时,表示由上述识别部识别出的场景是交通阻塞中的情况下,上述获取部(346)不对再次识别出的对象物进行从上述操作人员获取信息。9.一种识别方法,识别部识别存在于本车辆的行进方向上的对象物以及上述对象物的移动预测范围,判定部基于上述识别部的识别结果来判定上述本车辆的前进道路是否被上述对象物堵塞,
在由上述判定部判定为上述前进道路被堵塞的情况下,获取部从操作人员获取表示上述对象物是移动物还是静止物的信息,变更部基于由上述获取部获取的信息来变更由上述识别部识别出的上述移动预测范围。10.一种识别程序,用于使计算机作为以下部分发挥功能:识别部,识别存在于本车辆的行进方向上的对象物以及上述对象物的移动预测范围;判定部,基于上述识别部的识别结果来判定上述本车辆的前进道路是否被上述对象物堵塞;获取部,在由上述判定部判定为上述前进道路被堵塞的情况下,从操作人员获取表示上述对象物是移动物还是静止物的信息;以及变更部,基于由上述获取部获取的信息来变更由上述识别部识别出的上述移动预测范围。
技术总结
本发明涉及识别装置、方法以及程序。在识别装置(10)中,识别部(42)识别存在于本车辆(30)的行进方向上的对象物(74)以及对象物的移动预测范围(76),判定部(44)基于识别部的识别结果来判定本车辆的前进道路是否被对象物堵塞,在由判定部判定为前进道路被堵塞的情况下,获取部(46)从操作人员(70)获取表示对象物是移动物还是静止物的信息,变更部(48)基于由获取部获取的信息来变更由识别部识别出的移动预测范围。动预测范围。动预测范围。
技术研发人员:佐佐木健吾 伊藤章
受保护的技术使用者:株式会社电装
技术研发日:2020.10.19
技术公布日:2022/6/10
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。