技术特征:
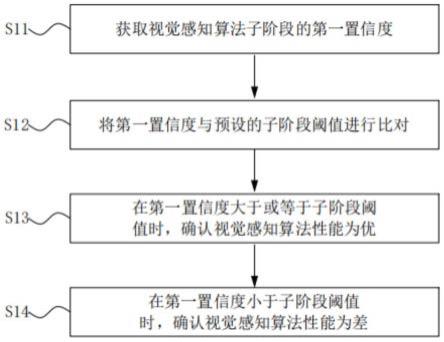
1.一种视觉感知算法评测方法,其特征在于,所述方法包括:获取视觉感知算法子阶段的第一置信度;将所述第一置信度与预设的子阶段阈值进行比对;在所述第一置信度大于或等于所述子阶段阈值时,确认所述视觉感知算法性能为优;在所述第一置信度小于所述子阶段阈值时,确认所述视觉感知算法性能为差。2.如权利要求1所述的方法,其特征在于,获取所述视觉感知算法总体的第二置信度;在所述第一置信度大于或等于所述子阶段阈值时,确认所述视觉感知算法性能为优,的步骤之后包括:判断所述第二置信度是否大于或等于预设的总体阈值;若是,则确认所述视觉感知算法的可用性输出结果为优,视觉感知信息可信;若否,则确认所述视觉感知算法的可用性输出结果为差,所述视觉感知信息不可信。3.如权利要求2所述的方法,其特征在于,在所述第一置信度小于所述子阶段不确定性指标阈值时,确认所述视觉感知算法性能为差,的步骤之后还包括:检测所述第二置信度是否大于或等于预设的总体阈值;在所述第二置信度大于或等于所述总体阈值时,确认使所述第一置信度小于所述子阶段阈值的影响因子,并生成相应的应对策略。4.如权利要求3所述的方法,其特征在于,所述视觉识别算法子阶段包括:彩色图像阈值分割流程模块、二值化流程模块、双边滤波去噪及填充流程模块和面积阈值去噪流程模块。5.如权利要求4所述的方法,其特征在于,所述影响因子包括:所述彩色图像阈值分割流程模块的第一置信度权重系数、所述二值化流程模块的第二置信度权重系数、所述双边滤波去噪及填充流程模块的第三置信度权重系数和所述面积阈值去噪流程模块的第四置信度权重系数。6.如权利要求5所述的方法,其特征在于,获取视觉感知算法子阶段的第一置信度,的步骤包括:根据所述第一置信度权重系数、所述第二置信度权重系数、所述第三置信度权重系数和所述第四置信度权重系数获取所述第一置信度。7.如权利要求4所述的方法,其特征在于,所述视觉感知算法还包括:原图遍历替换流程模块;获取所述视觉感知算法总体的第二置信度,的步骤还包括:通过所述原图遍历替换流程模块对目标区域进行遍历替换;获取替换后的所述目标区域的第二置信度。8.如权利要求1所述的方法,其特征在于,所述方法还包括:根据驾驶环境要素和数据集样本测试,设定所述视觉感知算法的子阶段阈值;根据真实场景测试数据集,设定所述视觉感知算法的总体阈值。
技术总结
本发明提供了一种视觉感知算法评测方法,所述方法包括:获取视觉感知算法子阶段的第一置信度;将所述第一置信度与预设的子阶段阈值进行比对;在所述第一置信度大于或等于所述子阶段阈值时,确认所述视觉感知算法性能为优;在所述第一置信度小于所述子阶段阈值时,确认所述视觉感知算法性能为差。通过上述方式能够对视觉感知算法的性能进行判断,使得视觉感知输出结果可信。输出结果可信。输出结果可信。
技术研发人员:朱凯文
受保护的技术使用者:武汉路特斯汽车有限公司
技术研发日:2022.02.23
技术公布日:2022/6/10
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。