技术特征:
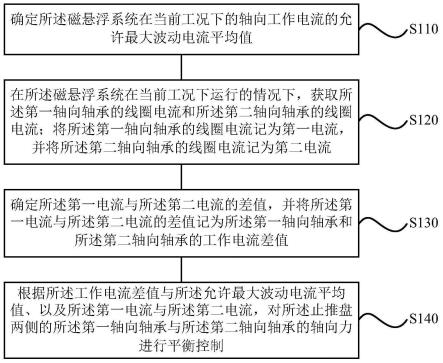
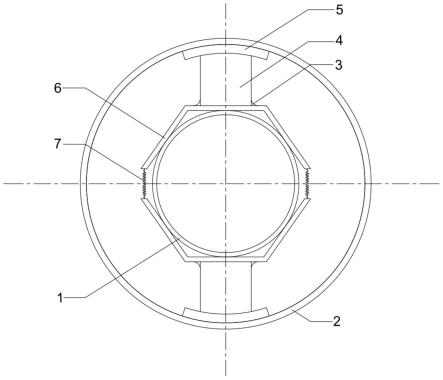
1.一种磁悬浮系统的控制方法,其特征在于,所述磁悬浮系统,包括:轴向轴承组;所述轴向轴承组,包括:第一轴向轴承和第二轴向轴承;所述磁悬浮系统,还包括:止推盘;所述止推盘,位于所述第一轴向轴承与所述第二轴向轴承之间;所述磁悬浮系统的控制方法,包括:确定所述磁悬浮系统在当前工况下的轴向工作电流的允许最大波动电流平均值;在所述磁悬浮系统在当前工况下运行的情况下,获取所述第一轴向轴承的线圈电流和所述第二轴向轴承的线圈电流;将所述第一轴向轴承的线圈电流记为第一电流,并将所述第二轴向轴承的线圈电流记为第二电流;确定所述第一电流与所述第二电流的差值,并将所述第一电流与所述第二电流的差值记为所述第一轴向轴承和所述第二轴向轴承的工作电流差值;根据所述工作电流差值与所述允许最大波动电流平均值、以及所述第一电流与所述第二电流,对所述止推盘两侧的所述第一轴向轴承与所述第二轴向轴承的轴向力进行平衡控制。2.根据权利要求1所述的磁悬浮系统的控制方法,其特征在于,确定所述磁悬浮系统在当前工况下的轴向工作电流的允许最大波动电流平均值,包括:根据设定工况与设定轴向电流工作参数之间的对应关系,将该对应关系中与所述当前工况相同的设定工况所对应的设定轴向电流工作参数,确定为与所述当前工况对应的当前轴向电流工作参数;所述设定轴向电流工作参数与所述当前轴向电流工作参数中的轴向电流工作参数,包括:轴向工作电流最大值、轴向工作电流最小值;根据所述当前轴向电流工作参数中轴向工作电流最大值、轴向工作电流最小值,确定在所述当前工况下的轴向工作电流的允许最大波动电流平均值。3.根据权利要求1所述的磁悬浮系统的控制方法,其特征在于,获取所述第一轴向轴承的线圈电流和所述第二轴向轴承的线圈电流,包括:按设定时间间隔,获取一组所述轴向轴承组的线圈电流;一组所述轴向轴承组的线圈电流,包括:所述第一轴向轴承的线圈电流和所述第二轴向轴承的线圈电流。4.根据权利要求1至3中任一项所述的磁悬浮系统的控制方法,其特征在于,根据所述工作电流差值与所述允许最大波动电流平均值、以及所述第一电流与所述第二电流,对所述止推盘两侧的所述第一轴向轴承与所述第二轴向轴承的轴向力进行平衡控制,包括:对所述第一电流和所述第二电流的获取次数进行计数,得到当前计数次数;在所述当前计数次数达到设定值的情况下,将所述当前计数次数确定为基准计数次数;结合所述工作电流差值与所述允许最大波动电流平均值之间的大小关系,或者结合所述工作电流差值与所述允许最大波动电流平均值之间的大小关系、以及所述第一电流与所述第二电流之间的大小关系,对所述基准计数次数进行更新,得到更新计数次数;根据所述更新计数次数,确定所述止推盘两侧所述轴向轴承组的轴向力是否平衡,以确定所述磁悬浮系统中转子的轴向运行状态是否正常;若所述转子的轴向运行状态正常,则继续根据所述轴向参考位置,控制所述转子继续运行;若所述转子的轴向运行状态出现异常,则对所述转子的轴向参考位置进行补偿,得到补偿轴向参考位置;并根据所述补偿轴向参考位置,控制所述转子继续运行。
5.根据权利要求4所述的磁悬浮系统的控制方法,其特征在于,结合所述工作电流差值与所述允许最大波动电流平均值之间的大小关系,或者结合所述工作电流差值与所述允许最大波动电流平均值之间的大小关系、以及所述第一电流与所述第二电流之间的大小关系,对所述基准计数次数进行更新,得到更新计数次数,包括:若所述工作电流差值的绝对值大于所述允许最大波动电流平均值的绝对值、且所述第一电流大于所述第二电流,则对所述基准计数次数加1,得到所述更新计数次数;若所述工作电流差值的绝对值大于所述允许最大波动电流平均值的绝对值、且所述第一电流小于所述第二电流,则对所述基准计数次减1,得到所述更新计数次数;若所述工作电流差值的绝对值小于所述允许最大波动电流平均值的绝对值,则将所述基准计数次作为所述更新计数次数。6.根据权利要求4所述的磁悬浮系统的控制方法,其特征在于,根据所述更新计数次数,确定所述止推盘两侧所述轴向轴承组的轴向力是否平衡,以确定所述磁悬浮系统中转子的轴向运行状态是否正常,包括:在所述工作电流差值的绝对值大于所述允许最大波动电流平均值的绝对值、且所述第一电流大于所述第二电流的情况下,若所述更新计数次数大于或等于第一设定计数值,则确定所述轴向轴承组的轴向存在向后负载力或所述止推盘发生后移,即确定所述磁悬浮系统中转子的轴向运行状态出现异常;第一设定计数值,大于所述设定值;在所述工作电流差值的绝对值大于所述允许最大波动电流平均值的绝对值、且所述第一电流小于所述第二电流的情况下,若所述更新计数次数小于或等于第二设定计数值,则确定所述止推盘发生前移,即确定所述磁悬浮系统中转子的轴向运行状态出现异常;第二设定计数值,小于所述设定值;在所述工作电流差值的绝对值小于所述允许最大波动电流平均值的绝对值的情况下,若所述更新计数次数大于第二设定计数值、且小于第一设定计数值,则确定所述磁悬浮系统中转子的轴向运行状态正常。7.根据权利要求4所述的磁悬浮系统的控制方法,其特征在于,对所述转子的轴向参考位置进行补偿,包括:确定所述轴向轴承组的轴向电流变化量平均值;将所述轴向轴承组的电流刚度系数与位移刚度系数的比值、所述轴向轴承组的轴向电流变化量平均值、以及设定方向系数的乘积,确定为所述转子的轴向补偿位移;将所述轴向参考位置与所述轴向补偿位移之和,确定为所述转子的补偿轴向参考位置。8.一种磁悬浮系统的控制装置,其特征在于,所述磁悬浮系统,包括:轴向轴承组;所述轴向轴承组,包括:第一轴向轴承和第二轴向轴承;所述磁悬浮系统,还包括:止推盘;所述止推盘,位于所述第一轴向轴承与所述第二轴向轴承之间;所述磁悬浮系统的控制装置,包括:获取单元和控制单元;其中,所述控制单元,被配置为确定所述磁悬浮系统在当前工况下的轴向工作电流的允许最大波动电流平均值;所述获取单元,被配置为在所述磁悬浮系统在当前工况下运行的情况下,获取所述第一轴向轴承的线圈电流和所述第二轴向轴承的线圈电流;将所述第一轴向轴承的线圈电流
记为第一电流,并将所述第二轴向轴承的线圈电流记为第二电流;所述控制单元,还被配置为确定所述第一电流与所述第二电流的差值,并将所述第一电流与所述第二电流的差值记为所述第一轴向轴承和所述第二轴向轴承的工作电流差值;所述控制单元,还被配置为根据所述工作电流差值与所述允许最大波动电流平均值、以及所述第一电流与所述第二电流,对所述止推盘两侧的所述第一轴向轴承与所述第二轴向轴承的轴向力进行平衡控制。9.根据权利要求8所述的磁悬浮系统的控制装置,其特征在于,所述控制单元,确定所述磁悬浮系统在当前工况下的轴向工作电流的允许最大波动电流平均值,包括:根据设定工况与设定轴向电流工作参数之间的对应关系,将该对应关系中与所述当前工况相同的设定工况所对应的设定轴向电流工作参数,确定为与所述当前工况对应的当前轴向电流工作参数;所述设定轴向电流工作参数与所述当前轴向电流工作参数中的轴向电流工作参数,包括:轴向工作电流最大值、轴向工作电流最小值;根据所述当前轴向电流工作参数中轴向工作电流最大值、轴向工作电流最小值,确定在所述当前工况下的轴向工作电流的允许最大波动电流平均值。10.根据权利要求8所述的磁悬浮系统的控制装置,其特征在于,所述获取单元,获取所述第一轴向轴承的线圈电流和所述第二轴向轴承的线圈电流,包括:按设定时间间隔,获取一组所述轴向轴承组的线圈电流;一组所述轴向轴承组的线圈电流,包括:所述第一轴向轴承的线圈电流和所述第二轴向轴承的线圈电流。11.根据权利要求8至10中任一项所述的磁悬浮系统的控制装置,其特征在于,所述控制单元,根据所述工作电流差值与所述允许最大波动电流平均值、以及所述第一电流与所述第二电流,对所述止推盘两侧的所述第一轴向轴承与所述第二轴向轴承的轴向力进行平衡控制,包括:对所述第一电流和所述第二电流的获取次数进行计数,得到当前计数次数;在所述当前计数次数达到设定值的情况下,将所述当前计数次数确定为基准计数次数;结合所述工作电流差值与所述允许最大波动电流平均值之间的大小关系,或者结合所述工作电流差值与所述允许最大波动电流平均值之间的大小关系、以及所述第一电流与所述第二电流之间的大小关系,对所述基准计数次数进行更新,得到更新计数次数;根据所述更新计数次数,确定所述止推盘两侧所述轴向轴承组的轴向力是否平衡,以确定所述磁悬浮系统中转子的轴向运行状态是否正常;若所述转子的轴向运行状态正常,则继续根据所述轴向参考位置,控制所述转子继续运行;若所述转子的轴向运行状态出现异常,则对所述转子的轴向参考位置进行补偿,得到补偿轴向参考位置;并根据所述补偿轴向参考位置,控制所述转子继续运行。12.根据权利要求11所述的磁悬浮系统的控制装置,其特征在于,所述控制单元,结合所述工作电流差值与所述允许最大波动电流平均值之间的大小关系,或者结合所述工作电流差值与所述允许最大波动电流平均值之间的大小关系、以及所述第一电流与所述第二电流之间的大小关系,对所述基准计数次数进行更新,得到更新计数次数,包括:若所述工作电流差值的绝对值大于所述允许最大波动电流平均值的绝对值、且所述第一电流大于所述第二电流,则对所述基准计数次数加1,得到所述更新计数次数;
若所述工作电流差值的绝对值大于所述允许最大波动电流平均值的绝对值、且所述第一电流小于所述第二电流,则对所述基准计数次减1,得到所述更新计数次数;若所述工作电流差值的绝对值小于所述允许最大波动电流平均值的绝对值,则将所述基准计数次作为所述更新计数次数。13.根据权利要求11所述的磁悬浮系统的控制装置,其特征在于,所述控制单元,根据所述更新计数次数,确定所述止推盘两侧所述轴向轴承组的轴向力是否平衡,以确定所述磁悬浮系统中转子的轴向运行状态是否正常,包括:在所述工作电流差值的绝对值大于所述允许最大波动电流平均值的绝对值、且所述第一电流大于所述第二电流的情况下,若所述更新计数次数大于或等于第一设定计数值,则确定所述轴向轴承组的轴向存在向后负载力或所述止推盘发生后移,即确定所述磁悬浮系统中转子的轴向运行状态出现异常;第一设定计数值,大于所述设定值;在所述工作电流差值的绝对值大于所述允许最大波动电流平均值的绝对值、且所述第一电流小于所述第二电流的情况下,若所述更新计数次数小于或等于第二设定计数值,则确定所述止推盘发生前移,即确定所述磁悬浮系统中转子的轴向运行状态出现异常;第二设定计数值,小于所述设定值;在所述工作电流差值的绝对值小于所述允许最大波动电流平均值的绝对值的情况下,若所述更新计数次数大于第二设定计数值、且小于第一设定计数值,则确定所述磁悬浮系统中转子的轴向运行状态正常。14.根据权利要求11所述的磁悬浮系统的控制装置,其特征在于,所述控制单元,对所述转子的轴向参考位置进行补偿,包括:确定所述轴向轴承组的轴向电流变化量平均值;将所述轴向轴承组的电流刚度系数与位移刚度系数的比值、所述轴向轴承组的轴向电流变化量平均值、以及设定方向系数的乘积,确定为所述转子的轴向补偿位移;将所述轴向参考位置与所述轴向补偿位移之和,确定为所述转子的补偿轴向参考位置。15.一种磁悬浮系统,其特征在于,包括:如权利要求8至14中任一项所述的磁悬浮系统的控制装置。16.一种存储介质,其特征在于,所述存储介质包括存储的程序,其中,在所述程序运行时控制所述存储介质所在设备执行权利要求1至7中任一项所述的磁悬浮系统的控制方法。
技术总结
本发明公开了一种磁悬浮系统的控制装置、磁悬浮系统及其磁悬浮系统的控制方法,该装置包括:确定磁悬浮系统在当前工况下的轴向工作电流的允许最大波动电流平均值;获取第一轴向轴承的线圈电流和第二轴向轴承的线圈电流,将第一轴向轴承的线圈电流记为第一电流,将第二轴向轴承的线圈电流记为第二电流;确定第一电流与第二电流的差值,并将第一电流与第二电流的差值记为第一轴向轴承和第二轴向轴承的工作电流差值;根据工作电流差值与允许最大波动电流平均值、以及第一电流与第二电流,对止推盘两侧的第一轴向轴承和第二轴向轴承的轴向力进行平衡控制。该方案,通过对轴向轴承的控制进行位移补偿,可有效避免止推盘两侧轴向轴承的轴向力不平衡。承的轴向力不平衡。承的轴向力不平衡。
技术研发人员:郑安琪 贺永玲 林润方
受保护的技术使用者:珠海格力电器股份有限公司
技术研发日:2022.03.15
技术公布日:2022/6/10
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。