技术特征:
1.一种计算机实现方法(30),用于训练生成性机器学习模型以用于对载具或机器人的操作轮廓进行建模,包括对抗地训练生成器模型和鉴别器模型,其中所述方法包括:
‑ꢀ
从数据空间获得(32)多个数据系列,其中每个数据系列描述载具或机器人的至少一个操作轮廓;
‑ꢀ
在训练生成性机器学习模型时的至少一个生成阶段期间,通过从分布中采样来生成(33)多个合成数据系列;
‑ꢀ
在训练生成性机器学习模型时的至少一个鉴别阶段期间,将(i)来自多个获得的数据系列的数据系列,或者(ii)来自所述多个合成数据系列的合成数据系列输入(34)到鉴别器模型中;
‑ꢀ
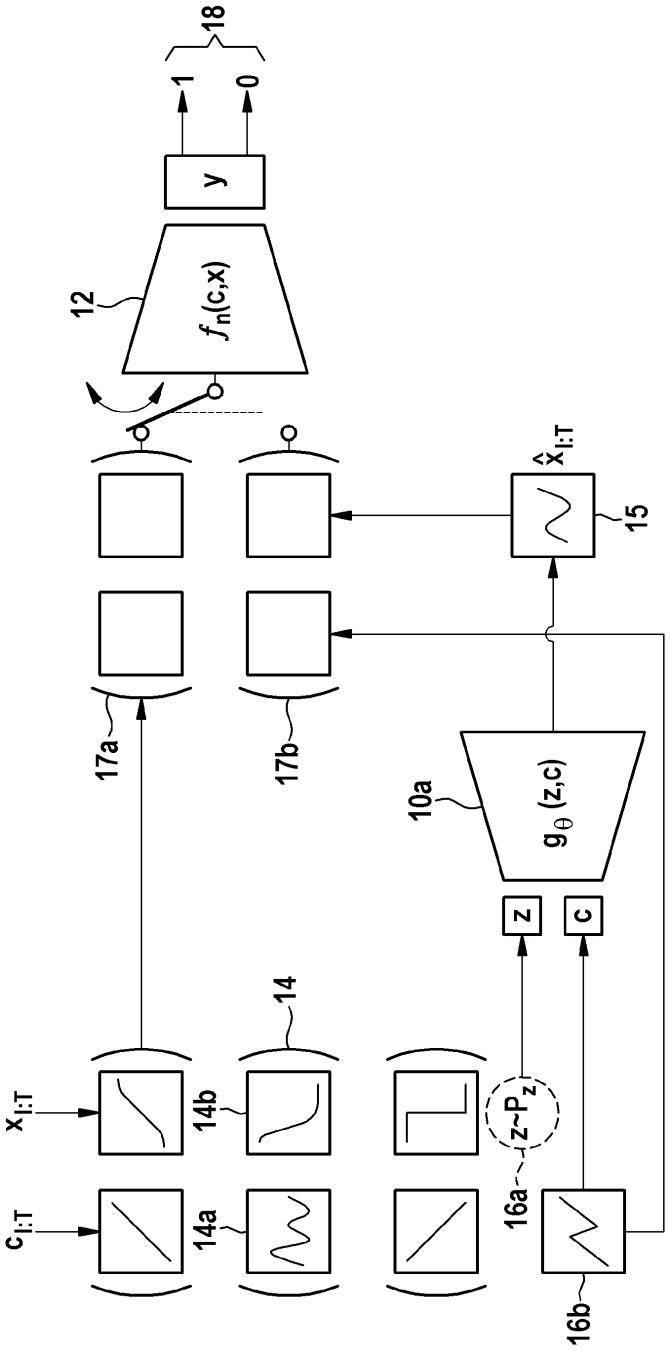
在训练生成性机器学习模型时的至少一个鉴别阶段期间,使用鉴别器模型的至少第一和第二函数将到鉴别器模型的输入分类(35)为来自数据空间的数据系列或合成数据系列;其中,第一函数(10)的多个输入包括合成数据系列的多个连续样本,并且第二函数(26)的至少一个输入包括从合成数据系列的不同步长取得的合成数据系列的至少两个数据样本;以及
‑ꢀ
迭代地训练(36)生成性机器学习模型的生成器模型和鉴别器模型,以产生包括经训练生成器模型的经训练机器学习模型。2.根据权利要求1所述的计算机实现方法(30),其中第一函数的输入是到鉴别器模型的输入的时间索引函数,并且第二函数的输入是到鉴别器模型的输入的可微函数。3.根据权利要求1或2所述的计算机实现方法(30),进一步包括:
‑ꢀ
使用鉴别器神经网络来组合第一和第二函数的输出;其中第一函数是递归神经网络,可选地是长短期记忆网络,和/或其中第二函数是通过如下方式获得的:投影至少一个合成数据系列,并基于投影的至少一个合成数据系列和来自多个数据系列的至少一个数据系列的组合获得鉴别器模型的第二函数的结果;其中鉴别器神经网络可选地计算鉴别器模型的第一和第二函数的线性组合。4.根据前述权利要求中的一项所述的计算机实现方法(30),其中包括在所述多个数据系列中的数据系列是时间系列或距离系列,并且其中所述多个合成数据系列中的合成数据系列是合成时间或距离数据系列。5.根据前述权利要求中的一项所述的计算机实现方法(30),其中,在至少一个生成阶段中,对潜在空间进行采样以提供所述多个合成数据系列。6.根据前述权利要求中的一项所述的计算机实现方法(30),进一步包括:
‑ꢀ
使用至少一个停止标准来停止生成器模型的迭代训练,其中所述至少一个停止标准是通过使用鉴别器模型的第二函数评估由生成器模型的迭代生成的至少一个合成数据系列而获得的,其中第二函数输出停止标准。7.根据前述权利要求中的一项所述的计算机实现方法(30),其中基于表示载具速度的至少一个数据系列和表示合成载具速度的至少一个合成数据系列,在一系列值上评估鉴别器模型的第二函数,所述一系列值从由真实或合成数据系
列所得的分布中采样;或者其中鉴别器模型的第二函数被配置为基于表示载具速度的至少一个合成数据系列来评估零速度下花费的时间;或者其中所述多个数据系列描述载具的多个操作轮廓,包括沿着路线行驶的载具的速度系列、发动机温度、发动机速度、踏板位置、转向角或换挡函数中的至少一个,并且到鉴别器模型的第二函数的输入包括从速度-加速度直方图采样的多个速度-加速度对;或者其中所述多个数据系列描述自主或半自主机器人的多个操作轮廓,包括位移系列、速度系列或表示自主或半自主机器人的致动器位置的系列中的至少一个。8.根据前述权利要求中的一项所述的计算机实现方法(30),其中鉴别器模型的输出由下式定义其中;其中是第一函数,是第二函数,并且和是投影,可选地实现为多层感知器。9.根据权利要求1至8中的一项所述的计算机实现方法(30),其中输入到鉴别器模型的第二函数的数据系列定义以下各项中的一个或多个:每单位时间的载具停止的整数次、载具加速到预定速度的持续时间、载具减速到预定速度的持续时间、载具减速到零速度的持续时间、载具速度对比路线曲率、载具速度对比路线倾斜度、载具速度对比总行程持续时间、每单位时间的换挡的整数次、达到预定速度的换挡函数、达到预定速度的换挡函数、达到零速度的换挡函数、换挡函数对比路线曲率、换挡函数对比路线倾斜度、换挡函数对比总行程持续时间、机器人致动器位置。10.根据前述权利要求中的一项所述的计算机实现方法(30),其中经训练生成性机器学习模型被配置为生成多个合成数据系列,与在鉴别器模型中不使用第二函数的情况下会生成的多个合成数据系列的统计分布相比,所述多个合成数据系列具有更类似于所述多个数据系列的统计分布的统计分布。11.一种用于使用生成性机器学习模型生成表示载具或机器人的合成操作轮廓的合成数据样本的计算机实现方法(30),包括:
‑ꢀ
依据根据权利要求1至10中的一项的方法获得的多个模型参数来配置生成性机器学习模型;
‑ꢀ
通过从被配置为提供伪随机向量的分布中采样来获得多个样本;
‑ꢀ
对分布的所述多个样本进行解码,以获得数据空间中的另外多个合成数据样本;以及
‑ꢀ
输出表示载具或机器人的合成操作轮廓的所述另外多个合成数据样本。12.一种装置(50),用于训练生成性机器学习模型以用于对载具或机器人的操作轮廓进行建模,包括对抗地训练存储在存储器中的生成器模型和鉴别器模型,所述装置包括:
‑ꢀ
输入接口(52),被配置为从数据空间获得多个数据系列,其中每个数据系列描述载具或机器人的至少一个操作轮廓;
‑ꢀ
处理器(54),被配置为在训练生成性机器学习模型时的至少一个生成阶段期间,通过从分布中采样来生成至少一个合成数据系列;
‑ꢀ
其中处理器被配置为在训练生成性机器学习模型时的至少一个鉴别阶段期间,将(i)来自多个获得的数据系列的数据系列,或者(ii)来自所述至少一个合成数据系列的合成数据系列输入到鉴别器模型中;
‑ꢀ
在训练生成性机器学习模型时的至少一个鉴别阶段期间,处理器被配置为使用鉴别器模型的至少第一和第二函数将到鉴别器模型的输入分类为来自数据空间的数据系列或合成数据系列;其中第一函数的多个输入包括合成数据系列的多个连续样本,并且第二函数的至少一个输入包括从合成数据系列的不同步长取得的合成数据系列的至少两个数据样本;
‑ꢀ
其中处理器被配置为迭代地训练生成性机器学习模型的生成器模型和鉴别器模型,以产生包括经训练生成器模型的经训练机器学习模型;并且其中所述装置进一步包括:
‑ꢀ
输出接口(56 ),被配置为输出经训练机器学习模型。13.一个或多个计算机程序元件,包括至少(i)用于根据权利要求1至10中的一项的方法来使用机器学习训练生成性机器学习模型的计算机可执行指令,和/或(ii)用于根据权利要求11生成合成数据系列的计算机可执行指令,和/或(iii)包括用于提供根据权利要求1至10中的一项训练的生成性机器学习模型的模型参数的计算机可执行指令。14.一种包括权利要求13的一个或多个计算机程序元件的计算机可读介质。15.一种用于训练另外的机器学习模型以用于对载具的操作轮廓进行建模的计算机实现方法(40),包括:
‑ꢀ
获得(41)如根据权利要求11的计算机实现方法生成的表示载具的合成操作轮廓的另外多个合成数据系列;
‑ꢀ
将表示载具的合成操作轮廓的所述另外多个合成数据系列输入(42)到另外的机器学习模型中;
‑ꢀ
迭代地训练(43)所述另外的机器学习模型;以及
‑ꢀ
输出(44)所述另外的机器学习模型的另外多个模型参数,以用于对载具的操作轮廓进行建模。
技术总结
对载具操作轮廓进行建模。数据驱动算法在汽车系统中的开发和应用对于汽车系统的准确模拟变得越来越重要。当模拟汽车系统时,生成表征目标汽车系统性能方面的大量合成数据点可能是有利的。例如,以此方式,可以模拟和统计评估各种未来场景。本发明涉及一种用于训练生成性机器学习模型的计算机实现方法、一种用于使用生成性机器学习模型生成合成数据系列的计算机实现方法、以及相关联装置。此外,本发明涉及一种相关联的计算机程序元件和计算机可读介质。读介质。读介质。
技术研发人员:M
受保护的技术使用者:罗伯特
技术研发日:2021.12.06
技术公布日:2022/6/7
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。