技术特征:
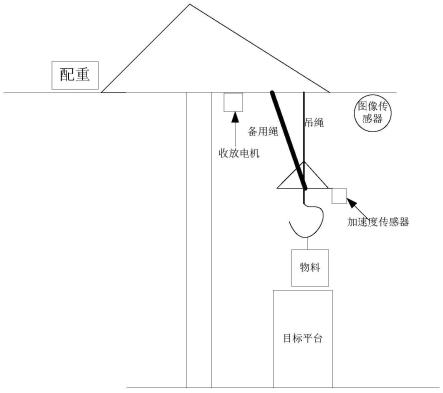
1.一种智能塔吊吊钩松开过程的监测控制方法,其特征在于,包括:在塔吊吊钩上安装加速度传感器,所述吊钩上方具有吊绳以及备用绳,所述吊绳以及备用绳由安装在主横梁上的收放电机进行控制,在主横梁上安装图像传感器,所述图像传感器指向所述吊钩的方向;当检测到吊钩下降控制指令时,启动加速度传感器,检测所述加速度传感器的数值大小;如果所述加速度传感器的数值小于预设阈值且持续时间超过第一预设时长时,不收紧备用绳并启动图像传感器;如果所述加速度传感器的数值大于等于所述预设阈值且持续时间超过第二预设时长时,通过收放电机收紧所述备用绳且启动图像传感器;获取当前吊装任务并解析,得到吊钩吊装的物料的尺寸信息,及准备放置的目标平台信息,所述目标平台信息包括目标平台的外观尺寸;图像传感器拍摄所述吊钩及物料方向的图像,基于所述图像中物料和目标平台的位置关系,以及目标平台的外观尺寸和物料的尺寸信息进行像素分析,计算得到所述物料和目标平台的实际位置关系;当物料位于目标平台上方时,根据所述物料的底部与所述目标平台的顶部之间的距离是否位于预设区间内,判断所述吊钩是否能够松开。2.根据权利要求1所述的方法,其特征在于,当吊绳正常工作时,所述备用绳处于常态松弛状态;当吊绳出现异常时,所述收放电机拉紧所述备用绳以处于收紧状态。3.根据权利要求2所述的方法,其特征在于,所述图像传感器拍摄所述吊钩及物料方向的图像,基于所述图像中物料和目标平台的位置关系,以及目标平台的外观尺寸和物料的尺寸信息进行像素分析,计算得到所述物料和目标平台的实际位置关系,包括:图像传感器拍摄所述吊钩及物料方向的图像;基于图像传感器的图像建立空间坐标系,根据物料在所述图像中所占像素的个数和所述物料的位置,得到所述物料在所述空间坐标系中的位置;根据目标平台在所述图像中所占像素的个数和所述目标平台的位置,得到所述目标平台在所述空间坐标系中的位置;基于所述物料在所述空间坐标系中的位置,所述目标平台在所述空间坐标系中的位置,以及目标平台的外观尺寸和物料的尺寸信息进行像素分析,计算得到所述物料和目标平台的实际位置关系。4.根据权利要求3所述的方法,其特征在于,所述根据物料在所述图像中所占像素的个数和所述物料的位置,得到所述物料在所述空间坐标系中的位置,包括:获取预先实验获得的所述物料在所述空间坐标系中不同的多个位置时拍摄获得的图像中,所述物料所占像素的个数和位置;将在收到吊钩下降控制指令时所述图像传感器拍摄的图像中物料所占像素的个数和位置,与所述预先实验获得的图像中物料所占像素的个数和位置进行匹配,将匹配度最高的作为所述物料在所述空间坐标系中的位置。5.根据权利要求4所述的方法,其特征在于,
所述根据目标平台在所述图像中所占像素的个数和所述目标平台的位置,得到所述目标平台在所述空间坐标系中的位置,包括:获取预先实验获得的所述目标平台在所述空间坐标系中不同的多个位置时拍摄获得的图像中,所述目标平台所占像素的个数和位置;将在收到吊钩下降控制指令时所述图像传感器拍摄的图像中目标平台所占像素的个数和位置,与所述预先实验获得的图像中目标平台所占像素的个数和位置进行匹配,将匹配度最高的作为所述目标平台在所述空间坐标系中的位置。6.如权利要求5所述的方法,其特征在于,所述基于所述物料在所述空间坐标系中的位置,所述目标平台在所述空间坐标系中的位置,以及目标平台的外观尺寸和物料的尺寸信息进行像素分析,计算得到所述物料和目标平台的实际位置关系,包括:基于所述物料在所述空间坐标系中的位置,所述目标平台在所述空间坐标系中的位置,得到所述物料和目标平台的相对位置关系;根据所述物料和目标平台的相对位置关系以及目标平台的外观尺寸和物料的尺寸信息,计算得到所述物料的底部与所述目标平台的顶部之间的距离。7.根据权利要求6所述的方法,其特征在于,所述当物料位于目标平台上方时,根据所述物料的底部与所述目标平台的顶部之间的距离是否位于预设区间内,判断所述吊钩是否能够松开,包括:当物料位于目标平台上方时,根据所述物料的底部与所述目标平台的顶部之间的距离位于预设区间内,判断所述吊钩能够松开;根据所述物料的底部与所述目标平台的顶部之间的距离位于预设区间外,判断所述吊钩不能够松开并报警提示。8.一种智能塔吊吊钩松开过程的监测控制系统,其特征在于,包括:传感器模块,用于在塔吊吊钩上安装加速度传感器,所述吊钩上方具有吊绳以及备用绳,所述吊绳以及备用绳由安装在主横梁上的收放电机进行控制,在主横梁上安装图像传感器,所述图像传感器指向所述吊钩的方向;加速度检测模块,用于当检测到吊钩下降控制指令时,启动加速度传感器,检测所述加速度传感器的数值大小;如果所述加速度传感器的数值小于预设阈值且持续时间超过第一预设时长时,不收紧备用绳并启动图像传感器;如果所述加速度传感器的数值大于等于所述预设阈值且持续时间超过第二预设时长时,通过收放电机收紧所述备用绳且启动图像传感器;目标平台获取模块,用于获取当前吊装任务并解析,得到吊钩吊装的物料的尺寸信息,及准备放置的目标平台信息,所述目标平台信息包括目标平台的外观尺寸;物料与平台位置计算模块,用于图像传感器拍摄所述吊钩及物料方向的图像,基于所述图像中物料和目标平台的位置关系,以及目标平台的外观尺寸和物料的尺寸信息进行像素分析,计算得到所述物料和目标平台的实际位置关系;吊钩松开判断模块,用于当物料位于目标平台上方时,根据所述物料的底部与所述目标平台的顶部之间的距离是否位于预设区间内,判断所述吊钩是否能够松开。9.一种电子设备,包括存储器、处理器及存储在所述存储器上并可在所述处理器上运
行的计算机程序,其特征在于,所述处理器运行所述计算机程序以实现如权利要求1-7任一项所述的方法。10.一种计算机可读存储介质,其上存储有计算机程序,其特征在于,所述程序被处理器执行实现如权利要求1-7中任一项所述的方法。
技术总结
本申请实施例提供一种智能塔吊吊钩松开过程的监测控制系统及其方法。该方法包括:当检测到吊钩下降控制指令时,启动加速度传感器,检测所述加速度传感器的数值大小;如果所述加速度传感器的数值小于预设阈值且持续时间超过第一预设时长时,不收紧备用绳并启动图像传感器;如果所述加速度传感器的数值大于等于所述预设阈值且持续时间超过第二预设时长时,通过收放电机收紧所述备用绳且启动图像传感器;图像传感器拍摄吊钩及物料方向的图像,基于图像中物料和目标平台的位置关系,以及目标平台的外观尺寸和物料的尺寸信息进行像素分析,计算得到物料和目标平台的实际位置关系;当物料位于目标平台上方时,根据物料的底部与目标平台的顶部之间的距离是否位于预设区间内,判断吊钩是否能够松开。判断吊钩是否能够松开。判断吊钩是否能够松开。
技术研发人员:陈德木 蒋云 陆建江 陈曦 赵晓东
受保护的技术使用者:杭州大杰智能传动科技有限公司
技术研发日:2022.01.24
技术公布日:2022/6/4
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。