技术特征:
1.一种点云处理方法,其特征在于,所述方法包括:获取测距装置所采集的点云数据以及所述测距装置的点云密度分布数据,所述点云密度分布数据与所述测距装置的扫描方式相关,其中,所述点云密度分布数据包括多个显著性系数,所述多个显著性系数用于表征点云数据在参考面上的映射点的分布特性;根据所述点云数据在所述参考面上的映射点所对应的所述显著性系数,确定所述点云数据的预定处理方式,其中,所述预定处理方式包括第一处理方式和第二处理方式中的至少一种,所述第一处理方式用于增大点云数据中的至少部分区域内的点云密度,所述第二处理方式用于降低点云数据中的至少部分区域内的点云密度;根据所述预定处理方式,对所述点云数据进行处理。2.如权利要求1所述的点云处理方法,其特征在于,获取测距装置所采集的点云数据以及所述测距装置的点云密度分布数据,包括:获取与所述测距装置的扫描方式所对应的至少一帧扫描图案,其中,所述扫描图案由所述测距装置的点云数据在参考面上的映射点所组成;根据所述扫描图案上的映射点在不同的统计区域内的数量,确定各个统计区域内的映射点所对应点云的显著性系数。3.如权利要求2所述的点云处理方法,其特征在于,根据所述扫描图案上的映射点在不同的统计区域内的数量,确定各个统计区域对应的显著性系数,包括:将多个所述统计区域内的映射点数量进行归一化处理,以获得各个统计区域内的映射点所对应点云的显著性系数。4.如权利要求2所述的点云处理方法,其特征在于,所述统计区域的尺寸基于所述测距装置预定探测的目标物的尺寸而定,其中,所述目标物包括第一目标物和第二目标物,所述第一目标物的尺寸大于所述第二目标物的尺寸,则与所述第一目标物对应的点云密度分布数据的统计区域具有第一尺寸,与所述第二目标物对应的点云密度分布数据的统计区域具有第二尺寸,所述第一尺寸大于所述第二尺寸。5.如权利要求2所述的点云处理方法,其特征在于,所述扫描图案由所述测距装置所输出的点云数据映射到所述参考面上而获得,或者,所述扫描图案由根据所述测距装置的扫描方式通过拟合函数而拟合获得。6.如权利要求1所述的点云处理方法,其特征在于,所述参考面具有多个统计区域,所述点云密度分布数据包括至少两种类型的点云密度分布数据,其中,不同类型的点云密度分布数据具有不同的统计区域尺寸。7.如权利要求6所述的点云处理方法,其特征在于,根据所述测距装置的扫描方式,获取与测距装置所采集的点云数据相对应的点云密度分布数据,还包括:根据所述扫描方式以及预定从所述点云数据中识别出的目标物的尺寸和统计区域的尺寸之间的关系,确定所述点云密度分布数据。8.如权利要求7所述的点云处理方法,其特征在于,所述点云密度分布数据为统计区域的尺寸小于或等于所述目标物的尺寸的点云密度分布数据。9.如权利要求1所述的点云处理方法,其特征在于,所述根据所述点云数据在所述参考面上的映射点所对应的所述显著性系数,确定所述点云数据的预定处理方式,包括:根据所述点云数据中点云所表征的深度信息和对应的所述显著性系数,确定点云数据
中点云的空间分布属性;根据所述空间分布属性,确定所述点云数据的预定处理方式。10.如权利要求9所述的点云处理方法,其特征在于,根据所述空间分布属性,确定所述点云数据的预定处理方式,包括:当所述点云数据中的第一部分点云对应的所述空间分布属性在第一阈值范围内时,确定所述第一部分点云的预定处理方式为所述第一处理方式;当所述点云数据中的第二部分点云对应的所述空间分布属性在第二阈值范围内时,确定所述第二部分点云的预定处理方式为所述第二处理方式。11.如权利要求10所述的点云处理方法,其特征在于,所述第一处理方式包括以下处理方式中的一种:插值、上采样、时间累积;所述第二处理方式包括下采样。12.如权利要求1所述的点云处理方法,其特征在于,所述点云密度分布数据以热力图的形式呈现,其中,所述热力图中的不同像素值用于表征不同的显著性系数。13.如权利要求12所述的点云处理方法,其特征在于,所述热力图包括第一像素点和第二像素点,所述第一像素点的像素值大于所述第二像素点的像素值,则与所述第一像素点对应的显著性系数大于与所述第二像素点对应的显著性系数;或者,所述热力图包括第一像素点和第二像素点,所述第一像素点的像素值大于所述第二像素点的像素值,则与所述第一像素点对应的显著性系数小于与所述第二像素点对应的显著性系数。14.如权利要求13所述的点云处理方法,其特征在于,所述像素值包括灰度值、颜色值或亮度值。15.如权利要求1至14任一项所述的点云处理方法,其特征在于,所述参考面为与所述测距装置所发射的光脉冲序列的中心轴相垂直的面。16.一种点云处理装置,其特征在于,所述点云处理装置包括:存储器,用于存储可执行指令;处理器,用于执行所述存储器中存储的所述指令,使得所述处理器执行以下步骤:获取测距装置所采集的点云数据以及所述测距装置的点云密度分布数据,所述点云密度分布数据与所述测距装置的扫描方式相关,其中,所述点云密度分布数据包括多个显著性系数,所述多个显著性系数用于表征点云数据在参考面上的映射点的分布特性;根据所述点云数据在所述参考面上的映射点所对应的所述显著性系数,确定所述点云数据的预定处理方式,其中,所述预定处理方式包括第一处理方式和第二处理方式中的至少一种,所述第一处理方式用于增大点云数据中的至少部分区域内的点云密度,所述第二处理方式用于降低点云数据中的至少部分区域内的点云密度;根据所述预定处理方式,对所述点云数据进行处理。17.如权利要求16所述的点云处理装置,其特征在于,根据所述测距装置的扫描方式,获取与测距装置所采集的点云数据相对应的点云密度分布数据,包括:获取与所述测距装置的扫描方式所对应的至少一帧扫描图案,其中,所述扫描图案由所述测距装置的点云数据在参考面上的映射点所组成;根据所述扫描图案上的映射点在不同的统计区域内的数量,确定各个统计区域内的映
射点所对应点云的显著性系数。18.如权利要求17所述的点云处理装置,其特征在于,根据所述扫描图案上的映射点在不同的统计区域内的数量,确定各个统计区域对应的显著性系数,包括:将多个所述统计区域内的映射点数量进行归一化处理,以获得各个统计区域内的映射点所对应点云的显著性系数。19.如权利要求17所述的点云处理装置,其特征在于,所述统计区域的尺寸基于所述测距装置预定探测的目标物的尺寸而定,其中,所述目标物包括第一目标物和第二目标物,所述第一目标物的尺寸大于所述第二目标物的尺寸,则与所述第一目标物对应的点云密度分布数据的统计区域具有第一尺寸,与所述第二目标物对应的点云密度分布数据的统计区域具有第二尺寸,所述第一尺寸大于所述第二尺寸。20.如权利要求17所述的点云处理装置,其特征在于,所述扫描图案由所述测距装置所输出的点云数据映射到所述参考面上而获得,或者,所述扫描图案由根据所述测距装置的扫描方式通过拟合函数而拟合获得。21.如权利要求16所述的点云处理装置,其特征在于,所述参考面具有多个统计区域,所述点云密度分布数据包括至少两种类型的点云密度分布数据,其中,不同类型的点云密度分布数据具有不同的统计区域尺寸。22.如权利要求21所述的点云处理装置,其特征在于,根据所述测距装置的扫描方式,获取与测距装置所采集的点云数据相对应的点云密度分布数据,还包括:根据所述扫描方式以及预定从所述点云数据中识别出的目标物的尺寸和统计区域的尺寸之间的关系,确定所述点云密度分布数据。23.如权利要求22所述的点云处理装置,其特征在于,所述点云密度分布数据为统计区域的尺寸小于或等于所述目标物的尺寸的点云密度分布数据。24.如权利要求16所述的点云处理装置,其特征在于,所述根据所述点云数据在所述参考面上的映射点所对应的所述显著性系数,确定所述点云数据的预定处理方式,包括:根据所述点云数据中点云所表征的深度信息和对应的所述显著性系数,确定点云数据中点云的空间分布属性;根据所述空间分布属性,确定所述点云数据的预定处理方式。25.如权利要求24所述的点云处理装置,其特征在于,根据所述空间分布属性,确定所述点云数据的预定处理方式,包括:当所述点云数据中的第一部分点云对应的所述空间分布属性在第一阈值范围内时,确定所述第一部分点云的预定处理方式为所述第一处理方式;当所述点云数据中的第二部分点云对应的所述空间分布属性在第二阈值范围内时,确定所述第二部分点云的预定处理方式为所述第二处理方式。26.如权利要求25所述的点云处理装置,其特征在于,所述第一处理方式包括以下处理方式中的一种:插值、上采样、时间累积;所述第二处理方式包括下采样。27.如权利要求16所述的点云处理装置,其特征在于,所述点云密度分布数据以热力图的形式呈现,其中,所述热力图中的不同像素值用于表征不同的显著性系数。28.如权利要求27所述的点云处理装置,其特征在于,所述热力图包括第一像素点和第
二像素点,所述第一像素点的像素值大于所述第二像素点的像素值,则与所述第一像素点对应的显著性系数大于与所述第二像素点对应的显著性系数;或者,所述热力图包括第一像素点和第二像素点,所述第一像素点的像素值大于所述第二像素点的像素值,则与所述第一像素点对应的显著性系数小于与所述第二像素点对应的显著性系数。29.如权利要求28所述的点云处理装置,其特征在于,所述像素值包括灰度值、颜色值或亮度值。30.如权利要求16至29任一项所述的点云处理装置,其特征在于,所述参考面为与所述测距装置所发射的光脉冲序列的中心轴相垂直的面。31.一种可移动平台,其特征在于,所述可移动平台包括:可移动平台本体;至少一个测距装置,设置于所述可移动平台本体,用于采集目标场景的点云数据;如权利要求16至30任一项所述的点云处理装置。32.如权利要求31所述的可移动平台,其特征在于,所述可移动平台包括飞行器、机器人、车辆、云台或船。33.一种计算机存储介质,其上存储有计算机程序,其特征在于,所述计算机程序被处理器执行时实现1至15任一项所述的点云处理方法。
技术总结
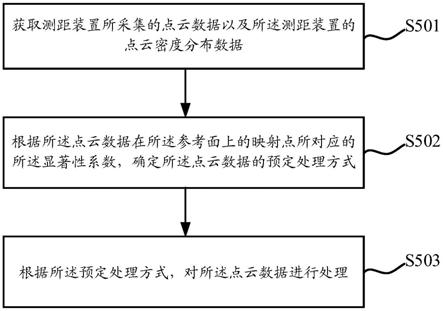
一种点云处理方法、点云处理装置、可移动平台和计算机存储介质。点云处理方法包括:获取测距装置所采集的点云数据以及测距装置的点云密度分布数据(S501),点云密度分布数据与测距装置的扫描方式相关,点云密度分布数据包括多个显著性系数,多个显著性系数用于表征点云数据在参考面上的映射点的分布特性;根据点云数据在参考面上的映射点所对应的显著性系数,确定点云数据的预定处理方式(S502),其中,预定处理方式包括第一处理方式和第二处理方式中的至少一种,第一处理方式用于增大点云数据中的至少部分区域内的点云密度,第二处理方式用于降低点云数据中的至少部分区域内的点云密度;根据预定处理方式,对点云数据进行处理(S503)。理(S503)。理(S503)。
技术研发人员:夏清 李延召
受保护的技术使用者:深圳市大疆创新科技有限公司
技术研发日:2020.12.16
技术公布日:2022/5/31
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。