技术特征:
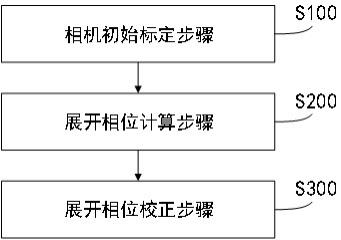
1.一种用于结构光三维测量的相位校正方法,其特征在于,包括以下步骤:相机初始标定步骤:配置三维测量模块,设置相机标定方法,基于所述三维测量模块和所述相机标定方法执行相机标定操作,得到第一标定参数;展开相位计算步骤:设置光机投射参数和展开相位计算公式;得到所述第一标定参数后,基于所述三维测量模块和所述光机投射参数执行图像投射操作,得到第一条纹图像;基于所述展开相位计算公式和所述第一条纹图像执行相位计算操作,得到第一展开相位;展开相位校正步骤:设置相位梯度计算公式、视差计算公式、深度值计算公式、梯度筛选标准、滤波阈值和梯度误差阈值;基于所述第一标定参数、所述第一展开相位、所述相位梯度计算公式、所述视差计算公式、所述深度值计算公式、所述梯度筛选标准、所述滤波阈值和所述梯度误差阈值执行相位校正操作。2.根据权利要求1所述的一种用于结构光三维测量的相位校正方法,其特征在于:所述三维测量模块包括:相机模组、光机模组和被测物模组;所述相机标定方法为张正友标定法;所述第一标定参数包括:第一焦距参数和第一基线参数;所述光机投射参数包括:背景光参数、调制光参数和投射正弦频率;所述展开相位计算公式包括:第一相位公式、第二相位公式和第三相位公式;所述第一条纹图像包括:第一频率条纹图、第二频率条纹图和第三频率条纹图;所述梯度筛选标准包括:相邻梯度正负值标准和相邻梯度一致性标准。3.根据权利要求2所述的一种用于结构光三维测量的相位校正方法,其特征在于:所述相机标定操作包括:采用所述张正友标定法对所述相机模组进行标定,得到所述第一焦距参数和所述第一基线参数。4.根据权利要求3所述的一种用于结构光三维测量的相位校正方法,其特征在于:所述图像投射操作包括:设定相位取值范围和公式更新变量值;获取投放需求,识别所述投放需求中的第一条纹精度值;基于所述相位取值范围和所述第一条纹精度值计算公式变更次数;基于所述背景光参数和所述调制光参数设定第一光强计算公式;基于所述公式更新变量值、所述公式变更次数和所述第一光强计算公式生成若干第二光强计算公式;基于所述第一条纹精度值和所述公式变更次数生成若干第二条纹精度值;按照所述公式变更次数将若干所述第二条纹精度值分别代入若干所述第二光强计算公式中,得到若干条纹光强值;基于若干所述条纹光强值设定条纹图像投射参数;首先调用所述光机模组按照所述条纹图像投射参数向所述被测物模组投射与所述投射正弦频率相匹配的条纹结构光,然后调用所述相机模组捕捉所述被测模组上的条纹结构光图像;基于所述条纹结构光图像进行极线校正处理,得到所述第一条纹图像。5.根据权利要求4所述的一种用于结构光三维测量的相位校正方法,其特征在于:所述相位计算操作包括:
识别所述第一频率条纹图所对应的第一条纹图像投射参数;识别所述第二频率条纹图所对应的第二条纹图像投射参数;识别所述第三频率条纹图所对应的第三条纹图像投射参数;将所述第一条纹图像投射参数代入所述第一相位公式进行计算,得到第一频包裹相位;将所述第二条纹图像投射参数代入所述第一相位公式进行计算,得到第二频包裹相位;将所述第三条纹图像投射参数代入所述第一相位公式进行计算,得到第三频包裹相位;将所述第一频包裹相位和所述第二频包裹相位代入所述第二相位公式进行计算,得到待计算展开相位;将所述第三频包裹相位和所述待计算展开相位代入所述第三相位公式进行计算,得到所述第一展开相位。6.根据权利要求5所述的一种用于结构光三维测量的相位校正方法,其特征在于:所述相位校正操作包括:设定数量阈值,基于所述第一展开相位、所述相位梯度计算公式、所述梯度筛选标准、所述滤波阈值、所述梯度误差阈值和所述数量阈值执行相位校正匹配步骤,得到若干第一同名点;基于所述第一标定参数、所述视差计算公式和所述深度值计算公式分别对若干所述第一同名点进行深度值计算步骤,得到若干第一图像深度值。7.根据权利要求6所述的一种用于结构光三维测量的相位校正方法,其特征在于:所述相位校正匹配步骤包括:设定第一像素行,在所述第一展开相位中识别所述第一像素行所对应的若干第一相位值;基于若干所述第一相位值设定若干相邻相位值组;基于所述相位梯度计算公式分别计算若干所述相邻相位值组分别对应的若干相邻相位梯度;基于所述相邻梯度正负值标准和若干所述相邻相位梯度设定若干第一梯度组;基于所述相邻梯度一致性标准和若干所述第一梯度组设定若干第二梯度组;基于所述第一展开相位识别若干所述第二梯度组分别对应的若干第一相位数量值;将所述数量阈值与若干所述第一相位数量值分别比对,设定小于所述数量阈值的所述第一相位数量值为低标准相位数量值;设定所述低标准相位数量值所对应的所述第二梯度组为随机相位梯度组;基于所述第一展开相位识别所述随机相位梯度组所对应的第一随机相位;首先基于所述滤波阈值对所述第一随机相位进行滤除操作,然后基于所述滤除操作更新所述第一展开相位和若干所述第二梯度组,得到第二展开相位和若干第三梯度组;配置同名点校正逻辑;所述同名点校正逻辑包括:基于所述第二展开相位设定第一同名匹配相位和第二同名匹配相位;在若干所述第三梯度组中识别所述第一同名匹配相位所对应的第一同名梯度组以及所述第二同名匹配相位所对应的第二同名梯度组;计算所述第一同名梯度组的相邻相位梯度与所述第二同名梯度组的相邻相位梯度的梯度差绝对值;判断所述梯度差绝对值是否小于所述梯度误差阈值,若小于,则将所述第一同名匹配相位和所述第二同名匹配相位整理为所述第一同名点;基于所述第二展开相位、所述同名点校正逻辑和若干所述第三梯度组进行相位同名点匹配,得到若干所述第一同名点。8.根据权利要求7所述的一种用于结构光三维测量的相位校正方法,其特征在于:
所述深度值计算步骤包括:识别所述第一同名点中所述第一同名匹配相位所对应的第一像素坐标以及所述第二同名匹配相位所对应的第二像素坐标;识别所述第一像素坐标的第一坐标列值以及所述第二像素坐标的第二坐标列值;将所述第一坐标列值和所述第二坐标列值代入所述视差计算公式,得到第一视差值;将所述第一焦距参数、所述第一基线参数和所述第一视差值代入所述深度值计算公式,得到所述第一图像深度值。9.基于权利要求1~8中任一项所述的一种用于结构光三维测量的相位校正方法的用于结构光三维测量的相位校正系统,其特征在于,包括:相机标定模块、相位计算模块和相位校正模块;所述相机标定模块用于配置三维测量模块和设置相机标定方法,所述相机标定模块基于所述三维测量模块和所述相机标定方法执行相机标定操作,得到第一标定参数;所述相位计算模块用于设置光机投射参数和展开相位计算公式;所述相位计算模块在得到所述第一标定参数后基于所述三维测量模块和所述光机投射参数执行图像投射操作,得到第一条纹图像;所述相位计算模块基于所述展开相位计算公式和所述第一条纹图像执行相位计算操作,得到第一展开相位;所述相位校正模块用于设置相位梯度计算公式、视差计算公式、深度值计算公式、梯度筛选标准、滤波阈值和梯度误差阈值;所述相位校正模块基于所述第一标定参数、所述第一展开相位、所述相位梯度计算公式、所述视差计算公式、所述深度值计算公式、所述梯度筛选标准、所述滤波阈值和所述梯度误差阈值执行相位校正操作。10.一种计算机可读存储介质,其特征在于,所述计算机可读存储介质上存储有计算机程序,所述计算机程序被处理器执行时实现权利要求1~8中任一项所述用于结构光三维测量的相位校正方法的步骤。
技术总结
本发明公开了一种用于结构光三维测量的相位校正方法、系统及介质,所述方法包括以下步骤:基于三维测量模块和相机标定方法执行相机标定操作,得到第一标定参数;基于三维测量模块和光机投射参数执行图像投射操作,得到第一条纹图像;基于展开相位计算公式和第一条纹图像执行相位计算操作,得到第一展开相位;基于第一标定参数、第一展开相位、相位梯度计算公式、视差计算公式、深度值计算公式、梯度筛选标准、滤波阈值和梯度误差阈值执行相位校正操作;本发明能够基于自主研发的相位校正算法对相位进行分组、滤波以及同名点分段匹配,防止了三维测量技术的测量精度受到同名展开相位的影响,最终提高了三维测量技术的适用性和精准度。准度。准度。
技术研发人员:周文良 刘宇航
受保护的技术使用者:中科融合感知智能研究院(苏州工业园区)有限公司
技术研发日:2022.01.19
技术公布日:2022/5/25
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。