技术特征:
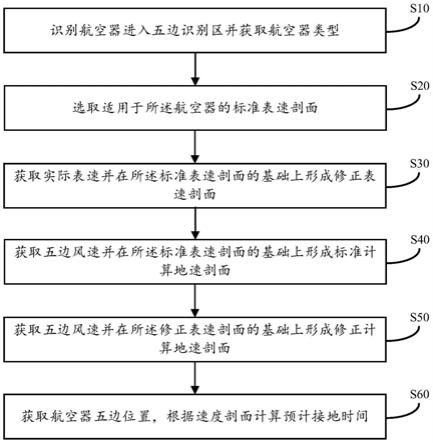
1.一种航空器速度监控与剖面计算方法,其特征在于,包括:识别航空器进入五边识别区并获取航空器类型;选取适用于所述航空器的标准表速剖面;获取实际表速并在所述标准表速剖面的基础上形成修正表速剖面;获取五边风速并在所述标准表速剖面的基础上形成标准计算地速剖面;获取五边风速并在所述修正表速剖面的基础上形成修正计算地速剖面;获取航空器五边位置,根据速度剖面计算预计接地时间;所述速度剖面包括标准表速剖面、修正表速剖面、标准计算地速剖面和修正计算地速剖面中的任意一种。2.根据权利要求1所述的航空器速度监控与剖面计算方法,其特征在于,所述标准表速剖面的计算步骤包括:记录每一航空器进入五边识别区后的飞行数据;所述飞行数据包括每个雷达周期下传的位置、高度、表速和地速中的任意一种或多种;根据所述飞行数据计算航空器的标准表速剖面,所述标准表速剖面表示为:p
sip
[v
sias
(x1),v
sias
(x2),...,v
sias
(x
n
)]其中,x
i
表示五边上的位置;v
sias
(x
i
)表示各个位置上的标准表速;p
sip
表示航空器的标准表速剖面;n是五边上计算位置节点的个数。3.根据权利要求2所述的航空器速度监控与剖面计算方法,其特征在于,在指定的一段时间内有指定种类航空器共m架,是其中第k架在五边x
a
位置上的表速,则五边中x
a
位置上的标准表速表示为:后续同类型航空器飞越五边x
a
位置时更新的标准表速表示为:其中,v
sias
(x
a
)表示为该类航空器在五边中x
a
位置上更新前的标准表速;v
′
sias
(x
a
)表示为该类型航空器在五边x
a
位置上更新后的标准表速;δv
sias
(x
a
)表示为该类型航空器在五边x
a
位置上更新后的标准表速与原标准表速的变化量。4.根据权利要求1所述的航空器速度监控与剖面计算方法,其特征在于,所述获取实际表速并根据所述标准表速剖面进行修正包括:获取航空器在指定位置的实际表速以及标准表速剖面上的该位置的标准表速,并计算实际表速与标准表速的速度偏差;当所述速度偏差大于预设的速度阈值时,触发修正;计算各位置节点的修正表速,并在标准表速剖面的基础上形成新的修正表速剖面。
5.根据权利要求4所述的航空器速度监控与剖面计算方法,其特征在于,所述修正表速剖面与所述标准表速剖面表示为:p
aip
=p
sip
δp
ias
p
aip
[v
aias
(x1),v
aias
(x2),...,v
aias
(x
n
)]=p
aip
[v
sias
(x1) δv
ias
(x1),v
sias
(x2) δv
ias
(x2),...,v
sias
(x
n
) δv
ias
(x2)]其中,p
aip
表示修正表速剖面;p
sip
表示航空器的标准表速剖面;δp
ias
表示修正表速剖面与航空器的标准表速剖面的偏差;x
i
表示五边上的位置;v
sias
(x
i
)表示各个位置上的标准表速;n是五边上计算位置节点的个数;v
aias
(x
i
)表示各个位置上的修正表速;δv
ias
(x
i
)表示x
i
位置上的实际表速与标准表速的速度偏差。6.根据权利要求5所述的航空器速度监控与剖面计算方法,其特征在于,所述修正表速剖面表示为:p
aip
[v
ias
(x1),v
aias
(x2),v
aias
(x3),...,v
aias
(x
d-1
),v
sias
(x
d
),v
sias
(x
d 1
),...,v
sias
(x
n
)]其中,v
ias
(x1)是航空器在x1位置的实际表速,航空器在x
d
位置恢复到标准表速;v
aias
(x
i
),i∈[2,d-1]则是[x2,x
d-1
]间的修正表速。7.根据权利要求1所述的航空器速度监控与剖面计算方法,其特征在于,所述获取五边风速并在所述修正表速剖面的基础上形成修正计算地速剖面包括:将获取的五边风速转换为五边风速剖面;利用所述五边风速剖面和标准表速剖面叠加五边各个位置上的表速和风速沿进近方向的分量大小,获得每个位置的地速;根据每个位置的地速得到标准计算地速剖面;获取航空器进入五边后的实际表速并和标准表速剖面叠加,得到修正表速剖面;利用所述五边风速剖面和修正表速剖面叠加五边各个位置上的表速和风速沿进近方向的分量的大小,获得每个位置的地速;根据每个位置的地速得到修正计算地速剖面。8.根据权利要求7所述的航空器速度监控与剖面计算方法,其特征在于,所述五边风速剖面表示为:p
w
[v
w
(x1),v
w
(x2),...,v
w
(x
n
)]其中,v
w
(x
i
)表示风速沿进近方向的分量的大小;x
i
表示五边上的位置;n是五边上计算位置节点的个数;p
w
表示五边风速剖面。9.根据权利要求8所述的航空器速度监控与剖面计算方法,其特征在于,所述标准计算地速剖面表示为:
p
scp
=p
sip
p
w
=p
scp
[v
sias
(x1) v
w
(x1),v
sias
(x2) v
w
(x2),...,v
sias
(x
n
) v
w
(x
n
)]其中,p
scp
表示标准计算地速剖面;p
sip
表示航空器的标准表速剖面;v
sias
(x
i
)表示各个位置上的标准表速。10.根据权利要求9所述的航空器速度监控与剖面计算方法,其特征在于,所述修正计算地速剖面表示为:p
acp
=p
aip
p
w
=p
acp
[v
aias
(x1) v
w
(x1),v
aias
(x2) v
w
(x2),...,v
aias
(x
n
) v
w
(x
n
)]其中,p
acp
表示修正计算地速剖面;p
aip
表示修正表速剖面;v
aias
(x
i
)表示各个位置上的修正表速。11.根据权利要求1所述的航空器速度监控与剖面计算方法,其特征在于,所述根据速度剖面计算预计接地时间的计算表示为:其中,p(x)表示速度剖面,即:p
sip
、p
scp
、p
aip
、p
acp
;x1表示航空器的初始位置;x2表示末位置;t表示航空器从x1运动到接地点所需的时间;设q(x)为1/p(x)的原函数,则:无表速偏离、无风情况下的预计接地时间:t
sip
=q
sip
(0)-q
sip
(x1)无表速偏离、有风情况下的预计接地时间:t
scp
=q
scp
(0)-q
scp
(x1)有速度偏离、无风情况下的预计接地时间:t
aip
=q
aip
(0)-q
aip
(x1)有速度偏离、有风情况下的预计接地时间:t
acp
=q
acp
(0)-q
acp
(x1)。12.根据权利要求1所述的航空器速度监控与剖面计算方法,其特征在于,还包括:接收输入数据,所述输入数据包括临时表速值和保持临时表速距离值;生成临时表速剖面;所述临时表速剖面表示为:p
tip
[v
tias
(x1),v
tias
(x2),...,v
tias
(x
n
)]其中,p
tip
表示临时表速剖面;v
tias
(x
i
)表示各个位置上的临时表速;x
i
表示五边上的位置;n是五边上计算位置节点的个数;所述临时表速剖面用于替代标准表速剖面进行计算。13.一种航空器速度监控与剖面计算装置,其特征在于,包括存储器和处理器,所述存
储器上存储有可在所述处理器上运行的航空器速度监控与剖面计算程序,所述航空器速度监控与剖面计算程序被所述处理器执行时实现如权利要求1至12中任一项所述的航空器速度监控与剖面计算方法的步骤。14.一种存储介质,其特征在于,所述存储介质为计算机可读存储介质,所述存储介质上存储有航空器速度监控与剖面计算程序,所述航空器速度监控与剖面计算程序可被一个或者多个处理器执行,以实现如权利要求1至12中任一项所述的航空器速度监控与剖面计算方法的步骤。
技术总结
本发明提供一种航空器速度监控与剖面计算方法,包括:识别航空器进入五边识别区并获取航空器类型;选取适用于所述航空器的标准表速剖面;获取实际表速并在所述标准表速剖面的基础上形成修正表速剖面;获取五边风速并在所述标准表速剖面的基础上形成标准计算地速剖面;获取五边风速并在所述修正表速剖面的基础上形成修正计算地速剖面;获取航空器五边位置,根据速度剖面计算预计接地时间。同时本发明还提供一种航空器速度监控与剖面计算装置及存储介质。本发明提供的技术方案,利用动态监控对飞行过程种持续对速度剖面进行修正,不断优化预测结果,不断优化各类航空器的速度剖面,使后续的五边飞行管理更加容易实现,且更精确。精确。精确。
技术研发人员:梁家伦 刘祚秋 张唯一 朱长威 康博 王斌 韩智恺 周仁浩
受保护的技术使用者:中国民用航空中南地区空中交通管理局
技术研发日:2021.12.29
技术公布日:2022/5/25
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。