技术特征:
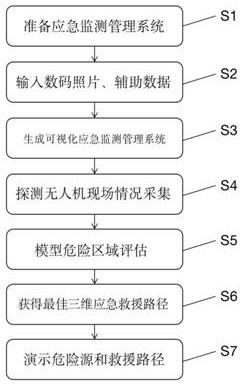
1.一种基于三维模型的应急管理监测方法,其特征在于:具体包括以下步骤:步骤s1:准备应急管理监测系统,所述应急管理监测系统包括控制台和探测无人机(10),所述探测无人机(10)上搭载中控模块(11)、充电模块(19)和导航建图避障模块(13)、无线传输模块(18)、气体传感器(15)、红外相机(17),所述红外相机(17)、气体传感器(15)、导航建图避障模块(13)、无线传输模块(18)、充电模块(19)分别与中控模块(11)电性连接;所述导航建图避障模块(13)对灾难现场出现的障碍物(24)进行探测,当红外相机(17)扫描到阻碍巡航路线上的物体时,将其标记为障碍物(24),第一时间作出避障处理;所述中控模块(11)包括分析单元、存储单元和传输单元,所述分析单元将红外相机(17)测得的温度t1、气体传感器(15)测得浓度w1和存储单元存储的温度阈值t0、气体浓度阈值w0,作为控制台的输入信息,判断现场属于危险区域、救援区域还是轻度危险区域,并将判断结果传递给传输单元,所述传输单元与无线传输模块(18)有线连接,输入红外相机(17)的视频信息、中控模块(11)输出的判断结果,将其传递给无线传输模块(18);所述探测无人机(10)通过所述无线传输模块(18)与控制台进行信息通讯;步骤s2:所述控制台包括三维实景建模软件管理层和三维实景建模软件引擎层,进行模型的搭建任务,所述搭建任务包括空中三角测量和模型三维重建,所述空中三角测量是立体摄影测量中,在所述三维实景建模软件管理层输入一组对目标化工工厂从不同角度拍摄的数码照片作为输入数据源,同时输入辅助数据,所述辅助数据包括摄像头的属性、照片的位置、旋转照片的角度、控制点(23)、危险温度阈值、气体浓度阈值,将所述数码照片中少量的野外控制点,在室内通过控制台进行控制点加密,求得加密点的高程和平面位置的测量方法,所述控制点(23)为遍历任务所需到达的位置;步骤s3:所述三维实景建模软件管理层将所述搭建任务分解为基础作业并提交给三维实景建模软件引擎层,所述三维实景建模软件引擎层进行基础作业的处理进行模型三维重建,所述三维实景建模软件引擎层生成的应急管理监测模型反馈回所述三维实景建模软件管理层,再由所述三维实景建模软件管理层导出高分辨率的带有真实纹理的应急监测管理模型,完成可视化的应急管理监测模型;步骤s4:所述探测无人机(10)采用避障建图算法进行自主导航和避障;所述红外相机(17)、气体传感器(15)采集信息,将采集到的信息同步传输到分析单元;步骤s5:对所述应急管理监测模型进行评估,划分为危险区域、救援区域、轻度危险区域三种,并标注救援区域和生成救援路线;步骤s6:通过引入危险区域辅助势场的人工势场算法,获得最佳三维应急救援路径;步骤s7:所述控制台通过动画演示建筑物内的危险源和最佳救援路线。2.根据权利要求1所述的基于三维模型的应急管理监测方法,其特征在于,步骤s4中,所述避障建图算法是一种融合特征法与直接法的算法,其建立三个线程,分别为探测无人机(10)实时跟踪、应急管理监测系统建图和闭环检测,具体为:步骤s41:探测无人机(10)位姿初始化:在探测无人机(10)启动时,将红外相机(17)拍摄到的第一帧图像作为关键帧,以当前三维坐标为基点,创建一个初始化地图;步骤s42:探测无人机(10)执行实时跟踪和应急管理监测系统建图,探测无人机(10)通过最小化光度误差,对红外相机(17)拍摄到的初始位姿和像素点的对应关系进行计算,再利用最小化局部地图点的重投影误差再次优化红外相机(17)的位姿,对局部地图进行跟
踪;若跟踪失败,则触发新的跟踪周期;所述红外相机(17)拍摄当前帧,若当前帧和前一帧有区别,则将当前帧判断为关键帧;若无区别,则将当前帧判断为非关键帧;在局部建图线程中,对当前关键帧图像中的orb特征进行提取与匹配,之后筛选出当前关键帧中冗余的地图点,由特征提取与匹配的结果来创建新的地图点,所述orb特征为基于加速分割测试的特征点和二元鲁棒独立基本特征描述子结合的特征;当处理完所有关键帧之后,执行局部 ba优化,对周围的关键帧位姿以及地图点位置进行优化,以获得更加准确的定位与建图精度,最后筛选候选关键帧,对冗余的关键帧进行剔除;步骤s43:探测无人机(10)进行闭环检测:在闭环检测线程中,通过检索图像识别数据库执行闭环检测,当检测到闭环时,对闭环周期进行判断,若当前关键帧与闭环关键帧不属于同一个周期,则将闭环关键帧的周期与当前关键帧的周期合并为同一周期,最后将此周期内的所有关键帧位姿与所有地图点位置作为优化变量执行全局 ba 优化,从而得到全局一致的环境地图和相机运动轨迹。3.根据权利要求1所述的基于三维模型的应急管理监测方法,其特征在于,所述中控模块(11)和导航建图避障模块(13)固定安装在所述探测无人机(10)的机架的上方,所述红外相机(17)和气体传感器(15)平行固定安装在所述探测无人机(10)的机架的下方,所述充电模块(19)固定安装在所述探测无人机(10)的机架的一个侧面。4.根据权利要求1所述的基于三维模型的应急管理监测方法,其特征在于,所述充电模块包括短路单元、过载单元,所述短路单元用于所述充电模块(19)在为探测无人机(10)充电中提供短路保护;所述过载单元用于充电模块(19)在为探测无人机(10)充电中提供过载保护。5.根据权利要求1所述的基于三维模型的应急管理监测方法,其特征在于,还包括抗高温保护膜,所述抗高温保护膜包裹所述探测无人机(10)上搭载的中控模块(11)、充电模块(19)、导航建图避障模块(13)、无线传输模块(18)、气体传感器(15)、红外相机(17),仅露出气体传感器(15)的通气孔、红外相机(17)的镜头孔和充电模块(19)的充电口。6.根据权利要求1所述的基于三维模型的应急管理监测方法,其特征在于,所述气体传感器(15)包括一氧化碳传感器。7.根据权利要求1所述的基于三维模型的应急管理监测方法,其特征在于,所述控制点(23)为存放危险物品的区域、存放贵重物品的区域、存放重要资料的区域、存在大量人群聚集的区域。8.根据权利要求1所述的基于三维模型的应急管理监测方法,其特征在于,所述控制点(23)包括灾难现场入口(22)和灾难现场出口(28)。9.根据权利要求1所述的基于三维模型的应急管理监测方法,其特征在于,所述控制台为电脑或平板电脑。10.根据权利要求1所述的基于三维模型的应急管理监测方法,其特征在于,步骤s6中,所述危险区域辅助势场的人工势场算法,指灾难现场存在三个力的势场:探测无人机(10)指向救援区域的引力势场、危险区域的斥力势场和危险区域辅助势场,所述引力势场随着救援区域与探测无人机(10)距离减小而减小;危险区域指向探测无人机(10)的斥力随探测
无人机(10)与危险区域间距的减小而增大;所述危险区域辅助势场与危险区域的速度以及探测无人机(10)与危险区域的相对角度有关,将救援区域引力势场、危险区域斥力势场和危险区域辅助势场合并,探测无人机(10)的运动由引力场、斥力场和危险区域辅助势场三个势场所叠加的合力控制,从而避开危险区域,完成路径规划,具体为:所述救援区域引力势场的函数为其中,为引力势能;为引力增益因子;为探测无人机与危险区域之间的欧氏距离;所述危险区域斥力势场,其危险区域速度的函数:危险区域斥力势场函数为:其中,为危险区域斥力势场增益调节参数,为机器人与危险区域的距离,为危险区域斥力势场影响范围;最后构建所述危险区域辅助势场函数为:其中,其为辅助势场随机增益调节函数;为增益调节系数,0≤≤1为随机数;为势场转换角度矩阵,为旋转角度,与无人机和危险区域的相对角度以及危险区域速度有关;因此探测无人机(10)所受的合力如下:所述探测无人机(10)所受的合力由救援区域引力势场、危险区域斥力势场和危险区域辅助势场组成的合势场负梯度方向计算而得。
技术总结
本发明公开了一种基于三维模型的应急管理监测方法,属于无人机监测技术领域。其通过探测无人机快速定位危险源并分析出危险区域、救援区域和安全区域,并设置建图避障模块和引入辅助势场后的人工势场算法,生成最佳三维应急救援路径,降低了无人机的不必要的折损,同时有助于提高救援人员的搜救效率,从而可防止救援人员清除危险源时造成人员无意义伤亡。救援人员清除危险源时造成人员无意义伤亡。救援人员清除危险源时造成人员无意义伤亡。
技术研发人员:梁越 刘云平 王巍学 解帅
受保护的技术使用者:南京信息工程大学
技术研发日:2022.04.20
技术公布日:2022/5/20
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。