技术特征:
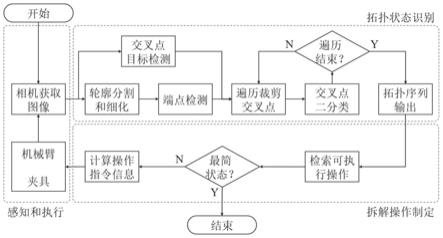
1.一种未知数量线状变形体拓扑状态识别和解缠方法,其特征在于,包括如下步骤:s100:对未知数量线状变形体进行拓扑状态识别;s200:根据拓扑状态识别的结果进行拆解操作制定;s300:机器人感知和执行解缠。2.根据权利要求1所述的未知数量线状变形体拓扑状态识别和解缠方法,其特征在于,使用相机获取的颜色系统图像作为系统输入的原始图像,同时训练一个卷积神经网络模型语义分割网络用于提取原始图像中的复数线状变形体轮廓信息在提取出的轮廓图的基础上,经过降噪预处理后,采用zhang-suen图像细化算法进一步提取轮廓的骨架图。3.根据权利要求2所述的未知数量线状变形体拓扑状态识别和解缠方法,其特征在于,所述复数线状变形体的端点检测采用八邻域法。4.根据权利要求2所述的未知数量线状变形体拓扑状态识别和解缠方法,其特征在于,所述复数线状变形体的交叉点检测采用深度学习方法,先训练一个实时目标检测网络,从复杂的背景中检测出各个交叉点区域的坐标,同时对图像处理方法容易出现交叉点误检的区域通过增加负样本的方式有效避免。5.根据权利要求4所述的未知数量线状变形体拓扑状态识别和解缠方法,其特征在于,所述复数线状变形体的交叉点的遍历是用一种遍历骨架图的算法来实现;通过根据获取图像中复数线状变形体的轮廓骨架,以及骨架图上的端点坐标和原始图像上的交叉点坐标,将目标检测网络返回的交叉点区域坐标映射到骨架图上,然后选择第一个端点作为遍历算法起点开始遍历流程。6.根据权利要求5所述的未知数量线状变形体拓扑状态识别和解缠方法,其特征在于,所述遍历流程,是遍历开始后检测是否存在未标记的端点,若不存在则直接结束,若存在则标记该端点,而后查找该端点附近的目标路点,确认是否进入交叉点区;若是进入交叉点区,则旋转、裁剪交叉点框图,跳跃交叉点得到跃出点,以进行方向矢量归一化,便于查找下一个目标路点;若没有进入交叉点区,则保存路点,而后更新方向矢量并查找下一目标路点。所述查找下一目标路点过程中,若不存在下一个目标路点则到达端点并标记该端点,而后重新检测是否存在未标记的端点。7.根据权利要求1所述的未知数量线状变形体拓扑状态识别和解缠方法,其特征在于,对交叉点拓扑状态的判定采用深度学习方法,训练基于深度残差网络的模型执行交叉点上下关系判定的二分类任务,并将交叉点序号和类型依次排列输出作为拓扑序列结果,依据结果可绘制拓扑状态识别可视化图。8.根据权利要求1所述的未知数量线状变形体拓扑状态识别和解缠方法,其特征在于,所述步骤s200,是将步骤s100中获得的拓扑序列形图,输入至可执行针对复数线状变形体的基础操作的机器人中,基于机器人的每个基础操作在拓扑序列中的逻辑规律和检索方法,按优先级顺序在拓扑序列中查找,确定当前应该执行的基础操作。9.根据权利要求7所述的未知数量线状变形体拓扑状态识别和解缠方法,其特征在于,所述机器人每获取一张可视化图和拓扑序列形图仅进行一次操作,操作结束后,进入下一个循环的识别和操作流程,直至识别得到的拓扑状态达到最简状态时结束。10.根据权利要求1所述的未知数量线状变形体拓扑状态识别和解缠方法,其特征在于,在所述步骤s300中,根据拓扑序列确定了基础操作类型后,利用遍历时记录的信息计算
机器人系统对复数线状变形体操作的抓取点、放置点及其抓取方向。
技术总结
本发明公开了一种未知数量线状变形体拓扑状态识别和解缠方法,包括如下步骤:S100:对未知数量线状变形体进行拓扑状态识别;S200:根据拓扑状态识别的结果进行拆解操作制定;S300:机器人感知和执行解缠。本发明提出的方法能够取得相较于其他方法更突出的效果,该方法不仅能够处理单根DLO、多根DLOs的场景,还能处理视野中DLOs数量未知的场景,无需人为给定数量,更符合实际应用需求。更符合实际应用需求。更符合实际应用需求。
技术研发人员:姜欣 黄旭钊 郭雨豪 刘云辉
受保护的技术使用者:哈尔滨工业大学(深圳)
技术研发日:2022.01.21
技术公布日:2022/4/29
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。