技术特征:
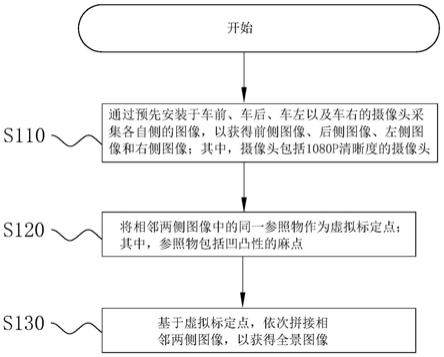
1.一种全景标定方法,其特征在于,包括:通过预先安装于车前、车后、车左以及车右的摄像头采集车前、车后、车左以及车右的图像,以获得前侧图像、后侧图像、左侧图像和右侧图像;将相邻两侧图像中的同一参照物作为虚拟标定点;其中,参照物包括凹凸性的麻点;基于所述虚拟标定点,依次拼接所述相邻两侧图像,以获得全景图像。2.一种全景标定方法,其特征在于,包括:通过预先安装于车辆前后左右的摄像头,采集各自所在侧的图像,以分别生成前视图像、后视图像、左视图像和右视图像;其中,在安装摄像头之前,需要先获取车辆驶入预先规划的停车位的进入信息,并基于所述进入信息,在所述停车位的四个角均投影预先设定的虚拟标定布;完成停车后,再安装摄像头;依次选择所述前视图像、后视图像、左视图像和右视图像内相邻的所述虚拟标定布的边缘点,以得到重合的边缘点;基于所述重合的边缘点,拼接所述前视图像、后视图像、左视图像和右视图像,以得到全景图像。3.根据权利要求2所述的一种全景标定方法,其特征在于,所述安装摄像头之后的步骤,包括:获取车辆的宽度信息,以获得车辆的宽度值;基于所述宽度值,调节投影出的所述虚拟标定布的面积大小。4.根据权利要求3所述的一种全景标定方法,其特征在于,所述调节投影出的所述虚拟标定布的面积大小的具体步骤,包括:将所述宽度值与预设的宽度阈值进行比较,若所述宽度值大于所述宽度阈值,则按照预设的缩放规则缩小投影出的所述虚拟标定布的面积,其中,每个所述虚拟标定布同比例缩放。5.根据权利要求2所述的一种全景标定方法,其特征在于,所述安装摄像头之后的步骤,还包括:获取车辆的长度信息,以获得车俩的长度值;基于所述长度值,分别调节车辆两侧长度方向两端所述虚拟标定布的间距。6.根据权利要求5所述的一种全景标定方法,其特征在于,所述分别调节车辆两侧长度方向两端所述虚拟标定布的间距的步骤,包括:将所述长度值与预设的长度阈值进行比较,若所述长度值大于或等于所述长度阈值,则按照预设的调节规则增大车辆长度方向两端所述虚拟标定布的间距;其中,车辆一侧长度方向两端的所述虚拟标定布的间距与另一侧长度方向两端的所述虚拟标定布的间距相等。7.根据权利要求2-6任一所述的一种全景标定方法,其特征在于,所述全景标定方法还包括:在投影出的所述虚拟标定布清晰时,采集第一环境光照信息,以获得第一光照强度值;实时采集第二环境光照信息,以获得第二光照强度值;将所述第二光照强度值与第一光照强度值进行比较,若所述第二光照强度值大于所述第一光照强度值,则提高所述虚拟标定布的清晰度。
8.一种全景标定系统,基于权利要求2所述的全景标定方法,其特征在于,包括:驶入信息获取模块(110),用于获取车辆驶入预先规划的停车位的进入信息;虚拟标定布投影模块(120),与所述驶入信息获取模块(110)连接,基于所述进入信息,在所述停车位的四个角均投影预先设定的虚拟标定布;图像采集模块(130),分别用于采集车辆前侧、后侧、左侧和右侧的图像,以生成对应的前视图像、后视图像、左视图像和右视图像;图像拼接模块(140),与所述图像采集模块(130)连接,用于获得相邻图像中重合的边缘点,并基于重合的边缘点,拼接所述前视图像、后视图像、左视图像和右视图像,以得到全景图像。9.根据权利要求8所述的一种全景标定系统,其特征在于,所述全景标定系统,还包括:车辆信息获取模块(150),用于获取车辆的宽度信息,以获得车辆的宽度值;调节模块(160),与所述车辆信息获取模块(150)连接,基于所述宽度值,调节所述虚拟标定布的面积大小。10.一种计算机设备,其特征在于,包括:存储器,用于存储全景标定程序;处理器,用于执行所述存储器上存储的全景标定程序,以实现如权利要求2-7任一所述的全景标定方法的步骤。
技术总结
本申请涉及一种全景标定方法、系统及计算机设备,属于通信的领域,全景标定方法包括通过预先安装于车前、车后、车左以及车右的摄像头采集车前、车后、车左以及车右的图像,以获得前侧图像、后侧图像、左侧图像和右侧图像;将相邻两侧图像中的同一参照物作为虚拟标定点;其中,参照物包括凹凸性的麻点;基于所述虚拟标定点,依次拼接所述相邻两侧图像,以获得全景图像。本申请具有提高标定操作的准确度的效果。果。果。
技术研发人员:邱泽锋 邱泽雨
受保护的技术使用者:深圳市全景达科技有限公司
技术研发日:2021.12.25
技术公布日:2022/4/26
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。