技术特征:
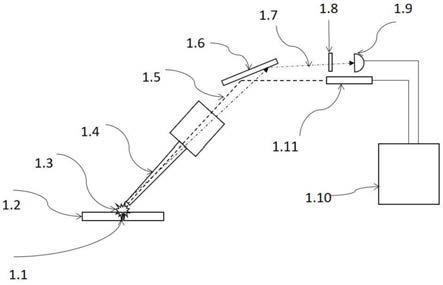
1.一种激光焊接系统,包括激光器输出头、焊接枪和反射镜,所述激光器输出头产生的焊接激光经由所述反射镜反射后通过所述焊接枪进行输出,其特征在于:还包括焊点确定装置,所述焊点确定装置包括相位板、相机以及与所述相机通信连接的上位机;所述反射镜还用于将所述焊接激光经所述待焊工件反射后形成的回返光反射到所述相位板上,所述相机用于采集所述回返光经所述相位板后的实时图像;所述上位机用于从数据库中匹配与所述实时图像最接近的预存图像,通过查表确定与所述预存图像对应的焊接点的位置,并将所述焊接点的位置确定为所述相机采集到所述实时图像的时刻下所述焊接激光在所述待焊工件上形成的焊点的位置。2.根据权利要求1所述的系统,其特征在于:所述相位板上设置有呈棋盘状或网格状分布的色块,且相邻色块间的明暗度各异。3.一种激光焊点位置确定方法,应用于如权利要求1或2所述的系统,其特征在于:所述方法包括以下步骤:s1、相机采集回返光经相位板后的实时图像,并发送给上位机;s2、上位机从预设的数据库中匹配出与所述实时图像最接近的预存图像;s3、上位机根据所述预存图像查表确定所述激光焊点的位置。4.根据权利要求3所述的方法,其特征在于:所述相位板上设置有呈棋盘状或网格状分布的色块,且相邻色块间的明暗度各异,则s2中,所述上位机从预设的数据库中匹配出与所述实时图像最接近的预存图像的步骤包括:s20、通过边界识别算法识别所述实时图像中各色块的边界,确定所述实时图像的边界图形,所述边界图形包含多个明暗边界点;s22、根据所述边界图形中明暗边界点的位置,计算所述实时图像与相位板之间的二阶矩,获得实时二阶矩列表;s24、对数据库中全部的预存图像进行s20和s22的处理过程,从而获得多个预存二阶矩列表,并建立记载有预存图像与预存二阶矩列表间一一对应关系的映射表格;s26、以相位板中心为原点的高斯分布为权重,将计算得到实时二阶矩列表与多个预存二阶矩列表采用最小二乘法进行比对,确定与所述实时二阶矩列表最接近的预存二阶矩列表;s28、根据与所述实时二阶矩列表最接近的预存二阶矩列表以及所述映射表格,查表确定与所述实时图像最接近的预存图像。5.根据权利要求4所述的方法,其特征在于:所述相位板上的色块呈n
×
m矩阵分布,则在s22之前还包括以下步骤:s21、将所述实时图像的边界图形划分为多个依次分布的计算块,每个所述计算块中均包含相同数量的色块,且各色块构成m阶矩阵,并以每个计算块内部的明暗边界点作为s22的输入,其中,m≥2。6.根据权利要求3所述的方法,其特征在于:所述上位机根据所述预存图像查表确定所述激光焊点的位置的步骤包括:s30、上位机根据所述预存图像查表确定回返光的角度;s32、上位机根据所述回返光的角度以及所述焊接激光的的位置,确定回返光与焊接激光的交点位置为所述激光焊点的位置。
技术总结
本发明公开了一种激光焊接系统及激光焊点位置确定方法,属于激光焊接领域。系统包括激光器输出头、焊接枪、反射镜和焊点确定装置;激光器输出头产生的焊接激光经由反射镜反射后通过焊接枪进行输出;焊点确定装置包括相位板、相机以及与相机通信连接的上位机;反射镜还用于将焊接激光经待焊工件反射后形成的回返光反射到相位板上,相机用于采集回返光经相位板后的实时图像;上位机用于从数据库中匹配与实时图像最接近的预存图像,并通过查表确定与预存图像对应的焊接点的位置为相机采集到实时图像的时刻下焊接激光在待焊工件上形成的焊点的位置。本发明通过简单的结构设计,能够以低成本的方式精确获得激光焊接点的位置。够以低成本的方式精确获得激光焊接点的位置。够以低成本的方式精确获得激光焊接点的位置。
技术研发人员:ꢀ(74)专利代理机构
受保护的技术使用者:江苏星链激光科技有限责任公司
技术研发日:2021.12.24
技术公布日:2022/4/1
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。