技术特征:
1.一种玻璃柔性电子检具,其特征在于:工业机器人的一侧固定有用于固定待测玻璃的夹具,所述工业机器人的手臂末端固定有面结构光传感器和距离传感器,所述面结构光传感器和距离传感器连接并输出感应信号至电气控制柜,所述电气控制柜连接并输出驱动信号至工业机器人。2.根据权利要求1所述的玻璃柔性电子检具,其特征在于:所述夹具固定待测玻璃的平面设有三个基准球,所述夹具倾斜固定待测玻璃。3.根据权利要求2所述的玻璃柔性电子检具,其特征在于:所述面结构光传感器和距离传感器的探测方向相同,所述面结构光传感器用于获取基准球的位置信号进行定位,所述距离传感器用于测量待测玻璃外曲面各位置的高度值。4.基于权利要求1-3中任一所述玻璃柔性电子检具的检测方法,其特征在于,包括以下步骤:步骤1:将待测玻璃放置于夹具上装夹到位;步骤2:工业机器人携带面结构光传感器顺序扫描基准球,计算出此时玻璃坐标系与机器人坐标系之间的关系,并保存此时玻璃坐标系位置信息;步骤3:根据步骤2保存的此时玻璃坐标系位置信息,对比标准玻璃样片玻璃坐标系与机器人基坐标系之间的关系,完成当前玻璃测量点位矫正;步骤4:获得曲面测量点位的测量距离值并计算曲面距离误差,并判定待测玻璃曲面形状是否合格;步骤5:获得轮廓测量点位的轮廓点坐标并计算轮廓点坐标偏离误差,并判定待测玻璃轮廓形状是否合格。5.根据权利要求4所述的检测方法,其特征在于:所述步骤3中,若夹具保持不动,则矫正后的测量点位仍为原规划的测量点位。6.根据权利要求4或5所述的检测方法,其特征在于:所述步骤4中,工业机器人驱动机器人使距离传感器逐个运行到校正后的曲面测量点位,触发距离传感器测量距离d',并补偿对应测量点位的距离误差补偿值作为真实的距离值d”,此时获得该测量点位的误差为e=d
”‑
d,如果误差e在设计公差范围内,则待测玻璃在此测量点位的曲面形状合格,若测量点位的误差均在设计公差范围内时,则判定待测玻璃曲面形状合格,否则判定待测玻璃曲面形状不合格。7.根据权利要求6所述的检测方法,其特征在于:所述步骤5中,工业机器人驱动机器人使距离传感器逐个运行到校正后的轮廓测量点位,触发面结构光传感器采集轮廓点数据,计算轮廓点坐标,并补偿对应测量点位的轮廓点坐标偏离误差作为真实的轮廓点坐标,此时比较测量的真实轮廓点坐标与设计的轮廓点坐标获得轮廓点坐标偏离误差,如果该坐标偏离误差小于设计的公差值,则认为在该轮廓测量点,玻璃轮廓形状合格,所有轮廓测量点位的坐标偏离误差均在设计的公差范围内时,则认为该待测玻璃轮廓形状合格,否则待测玻璃轮廓形状不合格。8.根据权利要求7所述的检测方法,其特征在于:获取误差补偿值的方法包括以下步骤:1)将标准玻璃样片放置于夹具上装夹到位;2)工业机器人携带面结构光传感器自动顺序扫描三个基准球,系统计算出玻璃坐标系
与机器人坐标系之间的关系,实现玻璃坐标系定位,同时系统保存玻璃坐标系位置信息;3)将玻璃设计3d模型和待检测点的坐标导入系统,设置一个固定的偏置距离d,机器人自动规划测量点位,在这些测量点位,距离传感器3垂直于待检测点处曲面,且传感器距离玻璃3d模型表面距离值为d;4)将玻璃四周轮廓待检测点输入系统,机器人自动规划测量点位;5)工业机器人逐个运行到曲面测量点位,触发距离传感器测量距离,将所有测量点位的距离误差值作为误差补偿值保存入系统;6)工业机器人逐个运行轮廓测量点位,触发面结构光传感器采集轮廓点数据,计算轮廓点坐标,与模型轮廓点坐标进行对比,计算坐标偏离误差,将所有测量点位的轮廓点坐标偏离误差作为坐标偏离误差补偿值保存入系统。9.根据权利要求7所述的检测方法,其特征在于:获取误差补偿值的方法包括以下步骤:1)将任一玻璃样片放置于夹具上装夹到位;2)工业机器人携带面结构光传感器自动顺序扫描三个基准球,系统计算出玻璃坐标系与机器人坐标系之间的关系,实现玻璃坐标系定位,同时系统保存玻璃坐标系位置信息;3)将玻璃设计3d模型和待检测点的坐标导入系统,设置一个固定的偏置距离d,机器人自动规划测量点位,在这些测量点位,距离传感器3垂直于待检测点处曲面,且传感器距离玻璃3d模型表面距离值为d;4)将玻璃四周轮廓待检测点输入系统,机器人自动规划测量点位,在这些点位,面结构光传感器可以检测指定轮廓点的坐标;5)工业机器人逐个运行到曲面测量点位,触发距离传感器测量距离,在这些曲面测量点位测量获得的距离值不等于设定的距离d,将以上所有曲面测量点位的测量距离值保存;6)工业机器人逐个运行轮廓测量点位,触发面结构光传感器采集轮廓点数据,计算轮廓点坐标,测量的轮廓点偏离模型轮廓点一定距离,将所有测量轮廓点坐标进行保存;7)将夹具转移至三坐标测量机下,通过三坐标测量机测量同一片玻璃,获得所有曲面测量点位的距离值,与电子检具测量的距离值对比,其差值作为电子检具的距离误差补偿值,获得所有轮廓点的坐标值,与电子检具测量的轮廓点坐标对比,其差值作为轮廓点坐标偏离误差补偿值。
技术总结
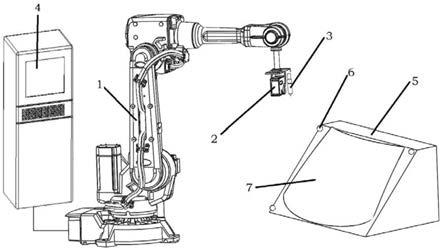
本发明揭示了一种玻璃柔性电子检具,工业机器人的一侧固定有用于固定待测玻璃的夹具,所述工业机器人的手臂末端固定有面结构光传感器和距离传感器,所述面结构光传感器和距离传感器连接并输出感应信号至电气控制柜,所述电气控制柜连接并输出驱动信号至工业机器人。本发明可用于汽车玻璃检测,适用于多种型号玻璃的同时批量检测,只需针对不同型号玻璃设计不同夹具,在工业机器人周边布置不同型号玻璃的夹具,并提前借助标准玻璃样片或借助三坐标测量机计算系统误差补偿值即可。测量机计算系统误差补偿值即可。测量机计算系统误差补偿值即可。
技术研发人员:王飞阳 庄金雷 陈盟 宋昕睿 高靖
受保护的技术使用者:哈尔滨工业大学芜湖机器人产业技术研究院
技术研发日:2021.12.24
技术公布日:2022/4/1
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。