技术特征:
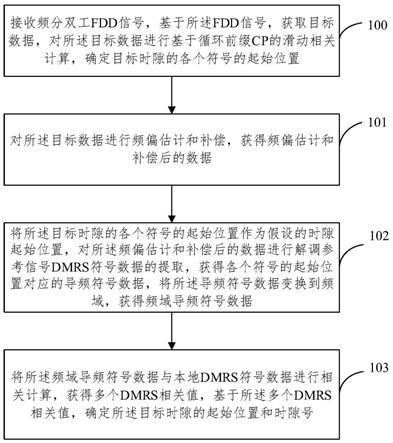
1.一种时隙同步检测方法,其特征在于,包括:接收频分双工fdd信号,基于所述fdd信号,获取目标数据,对所述目标数据进行基于循环前缀cp的滑动相关计算,确定目标时隙的各个符号的起始位置;对所述目标数据进行频偏估计和补偿,获得频偏估计和补偿后的数据;将所述目标时隙的各个符号的起始位置作为假设的时隙起始位置,对所述频偏估计和补偿后的数据进行解调参考信号dmrs符号数据的提取,获得各个符号的起始位置对应的导频符号数据,将所述导频符号数据变换到频域,获得频域导频符号数据;将所述频域导频符号数据与本地dmrs符号数据进行相关计算,获得多个dmrs相关值,基于所述多个dmrs相关值,确定所述目标时隙的起始位置和时隙号。2.根据权利要求1所述的时隙同步检测方法,其特征在于,所述基于所述fdd信号,获取目标数据,对所述目标数据进行基于循环前缀cp的滑动相关计算,确定目标时隙的各个符号的起始位置,包括:基于所述fdd信号,获取目标数据,所述目标数据的长度为1slot fft_length cp_2-1,其中,1slot为一个时隙的长度,fft_length为一个符号的数据部分的长度,cp_2为时隙的第二个符号的cp部分的长度;获取所述目标数据中各个符号对应的cp数据,以及符号末尾与所述cp数据对应的数据;将所述cp数据,以及所述符号末尾与所述cp数据对应的数据进行滑动相关计算,获得每个滑动数据点对应的cp相关值;基于所述每个滑动数据点对应的cp相关值,将每个滑动数据点对应的各个符号的cp相关值进行累加,获得各个滑动数据点对应的各个符号的cp相关值的累加和;根据所述每个滑动数据点对应的各个符号的cp相关值的累加和,计算每个滑动数据点对应的cp相关值能量;根据所述每个滑动数据点对应的cp相关值能量,确定所述cp相关值能量的峰值位置,将所述峰值位置作为各个符号的起始位置。3.根据权利要求2所述的时隙同步检测方法,其特征在于,所述根据所述每个滑动数据点对应的cp相关值能量,确定所述cp相关值能量的峰值位置,将所述峰值位置作为各个符号的起始位置,包括:确定所述目标时隙的第一个符号的起始位置搜索范围,在所述第一个符号的起始位置搜索范围内,确定所述第一个符号的cp相关值能量中的最大值,将所述最大值对应的数据点位置作为所述第一个符号的起始位置;针对所述目标时隙的第二个符号至第m个符号中的每个符号执行以下步骤:基于当前符号的前一符号的起始位置,确定当前符号的起始位置搜索范围,并在所述当前符号的起始位置搜索范围内,确定所述当前符号的cp相关值能量中的最大值,将所述最大值对应的数据点位置作为所述当前符号的起始位置;其中,m为一个时隙所包含的符号个数。4.根据权利要求3所述的时隙同步检测方法,其特征在于,所述确定所述目标时隙的第一个符号的起始位置搜索范围,具体为:利用公式一确定所述目标时隙的第一个符号的起始位置搜索范围:
sym_hd_range=1:(fft_length cp_2)*a
ꢀꢀꢀꢀꢀ
公式一其中,sym_hd_range为起始位置搜索范围,a为系数;所述基于当前符号的前一符号的起始位置,确定当前符号的起始位置搜索范围,具体为:基于当前符号的前一符号的起始位置,利用公式二确定当前符号的起始位置搜索范围:start=max posit_sym(ii-1) (fft_length cp_2)*0.5 1end=min(maxposit_sym(ii-1) (fft_length cp_2)*1.5),61440)sym_hd_range=(start:end)
ꢀꢀꢀꢀꢀꢀꢀ
公式二其中,start为起始位置搜索范围的下边界,end为起始位置搜索范围的上边界,maxposit_sym(ii-1)为当前符号的前一符号的起始位置,ii为当前符号的索引,ii=2:m。5.根据权利要求1所述的时隙同步检测方法,其特征在于,所述将所述目标时隙的各个符号的起始位置作为假设的时隙起始位置,对所述频偏估计和补偿后的数据进行解调参考信号dmrs符号数据的提取,获得各个符号的起始位置对应的导频符号数据,包括:基于所述目标时隙的各个符号的起始位置,确定所述导频符号数据的起始位置;根据所述导频符号数据的起始位置,确定所述导频符号数据的结束位置;从所述频偏估计和补偿后的数据中提取从所述起始位置到所述结束位置的数据作为所述导频符号数据。6.根据权利要求5所述的时隙同步检测方法,其特征在于,所述基于所述目标时隙的各个符号的起始位置,确定所述导频符号数据的起始位置,具体为:基于所述目标时隙的各个符号的起始位置,利用公式三确定所述导频符号数据的起始位置:所述根据所述导频符号数据的起始位置,确定所述导频符号数据的结束位置,具体为:根据所述导频符号数据的起始位置,利用公式四确定所述导频符号数据的结束位置:dmrs_sym_post=dmrs_sym_pre fft_length-1
ꢀꢀꢀꢀ
公式四其中,dmrs_sym_pre为所述导频符号数据的起始位置,maxposit_sym(ii)为所述目标时隙的各个符号的起始位置,ii=1:m,m为一个时隙所包含的符号个数,dmrsposit(1)为一个用于表示dmrs符号在时隙中的位置的矩阵,fft_length为时隙的一个符号的数据部分长度,cp_2为时隙的第二个符号的cp部分长度,cp_1为时隙的第一个符号的cp部分长度,dmrs_sym_post为所述导频符号数据的结束位置。7.根据权利要求1所述的时隙同步检测方法,所述将所述频域导频符号数据与本地dmrs符号数据进行相关计算,获得多个dmrs相关值,基于所述多个dmrs相关值,确定所述目标时隙的起始位置和时隙号,包括:将所述频域导频符号数据与本地dmrs符号数据进行共轭点乘,获得n组点乘结果;将每组所述点乘结果通过逆离散傅立叶变换变换到时域,并求取时域信道冲击响应功率,获得所述各个符号的起始位置对应的n组dmrs相关值;求取所述n组dmrs相关值的最大值,获得所述各个符号的起始位置对应的dmrs相关值
峰值;确定所述各个符号的起始位置对应的dmrs相关值峰值中的最大值,根据所述最大值确定所述目标时隙的起始位置和时隙号;其中,n为一个无线帧所包含的时隙数。8.一种接收端设备,其特征在于,包括存储器、收发机和处理器:存储器,用于存储计算机程序;收发机,用于在所述处理器的控制下收发数据;处理器,用于读取所述存储器中的计算机程序并执行以下操作:接收频分双工fdd信号,基于所述fdd信号,获取目标数据,对所述目标数据进行基于循环前缀cp的滑动相关计算,确定目标时隙的各个符号的起始位置;对所述目标数据进行频偏估计和补偿,获得频偏估计和补偿后的数据;将所述目标时隙的各个符号的起始位置作为假设的时隙起始位置,对所述频偏估计和补偿后的数据进行解调参考信号dmrs符号数据提取,获得各个符号的起始位置对应的导频符号数据,将所述导频符号数据变换到频域,获得频域导频符号数据;将所述频域导频符号数据与本地dmrs符号数据进行相关计算,获得多个dmrs相关值,基于所述多个dmrs相关值,确定所述目标时隙的起始位置和时隙号。9.根据权利要求8所述的接收端设备,其特征在于,所述基于所述fdd信号,获取目标数据,对所述目标数据进行基于循环前缀cp的滑动相关计算,确定目标时隙的各个符号的起始位置,包括:基于所述fdd信号,获取目标数据,所述目标数据的长度为1slot fft_length cp_2-1,其中,1slot为一个时隙的长度,fft_length为时隙的一个符号的数据部分的长度,cp_2为时隙的第二个符号的cp部分的长度;获取所述目标数据中各个符号对应的cp数据,以及符号末尾与所述cp数据对应的数据;将所述cp数据,以及所述符号末尾与所述cp数据对应的数据进行滑动相关计算,获得每个滑动数据点对应的cp相关值;基于所述每个滑动数据点对应的cp相关值,将每个滑动数据点对应的各个符号的cp相关值进行累加,获得各个滑动数据点对应的各个符号的cp相关值的累加和;根据所述每个滑动数据点对应的各个符号的cp相关值的累加和,计算每个滑动数据点对应的cp相关值能量;根据所述每个滑动数据点对应的cp相关值能量,确定所述cp相关值能量的峰值位置,将所述峰值位置作为各个符号的起始位置。10.根据权利要求9所述的接收端设备,其特征在于,所述根据所述每个滑动数据点对应的cp相关值能量,确定所述cp相关值能量的峰值位置,将所述峰值位置作为各个符号的起始位置,包括:确定所述目标时隙的第一个符号的起始位置搜索范围,在所述第一个符号的起始位置搜索范围内,确定所述第一个符号的cp相关值能量中的最大值,将所述最大值对应的数据点位置作为所述第一个符号的起始位置;针对所述目标时隙的第二个符号至第m个符号中的每个符号执行以下步骤:基于当前符号的前一符号的起始位置,确定当前符号的起始位置搜索范围,并在所述当前符号的起
始位置搜索范围内,确定所述当前符号的cp相关值能量中的最大值,将所述最大值对应的数据点位置作为所述当前符号的起始位置;其中,m为一个时隙所包含的符号个数。11.根据权利要求10所述的接收端设备,其特征在于,所述确定所述目标时隙的第一个符号的起始位置搜索范围,具体为:利用公式一确定所述目标时隙的第一个符号的起始位置搜索范围:sym_hd_range=1:(fft_length cp_2)*a
ꢀꢀꢀ
公式一其中,sym_hd_range为起始位置搜索范围,a为系数,fft_length为时隙的一个符号的数据部分长度,cp_2为时隙的第二个符号的cp部分长度;所述基于当前符号的前一符号的起始位置,确定当前符号的起始位置搜索范围,具体为:基于当前符号的前一符号的起始位置,利用公式二确定当前符号的起始位置搜索范围:start=max posit_sym(ii-1) (fft_length cp_2)*0.5 1end=min(maxposit_sym(ii-1) (fft_length cp_2)*1.5),61440)sym_hd_range=(start:end)
ꢀꢀꢀꢀꢀꢀ
公式二其中,start为起始位置搜索范围的下边界,end为起始位置搜索范围的上边界,maxposit_sym(ii-1)为当前符号的前一符号的起始位置,ii为当前符号的索引,ii=2:m。12.根据权利要求8所述的接收端设备,其特征在于,所述将所述目标时隙的各个符号的起始位置作为假设的时隙起始位置,对所述频偏估计和补偿后的数据进行解调参考信号dmrs符号数据的提取,获得各个符号的起始位置对应的导频符号数据,包括:基于所述目标时隙的各个符号的起始位置,确定所述导频符号数据的起始位置;根据所述导频符号数据的起始位置,确定所述导频符号数据的结束位置;从所述频偏估计和补偿后的数据中提取从所述起始位置到所述结束位置的数据作为所述导频符号数据。13.根据权利要求12所述的接收端设备,其特征在于,所述基于所述目标时隙的各个符号的起始位置,确定所述导频符号数据的起始位置,具体为:基于所述目标时隙的各个符号的起始位置,利用公式三确定所述导频符号数据的起始位置:所述根据所述导频符号数据的起始位置,确定所述导频符号数据的结束位置,具体为:根据所述导频符号数据的起始位置,利用公式四确定所述导频符号数据的结束位置:dmrs_sym_post=dmrs_sym_pre fft_length-1
ꢀꢀꢀꢀꢀ
公式四其中,dmrs_sym_pre为所述导频符号数据的起始位置,maxposit_sym(ii)为所述目标时隙的各个符号的起始位置,ii=1:m,m为一个时隙所包含的符号个数,dmrsposit(1)为一个用于表示dmrs符号在时隙中的位置的矩阵,fft_length为时隙的一个符号的数据部分长度,cp_2为时隙的第二个符号的cp部分长度,cp_1为时隙的第一个符号的cp部分长度,dmrs_sym_post为所述导频符号数据的结束位置。
14.根据权利要求8所述的接收端设备,所述将所述频域导频符号数据与本地dmrs符号数据进行相关计算,获得多个dmrs相关值,基于所述多个dmrs相关值,确定所述目标时隙的起始位置和时隙号,包括:将所述频域导频符号数据与本地dmrs符号数据进行共轭点乘,获得n组点乘结果;将每组所述点乘结果通过逆离散傅立叶变换变换到时域,并求取时域信道冲击响应功率,获得所述各个符号的起始位置对应的n组dmrs相关值;求取所述n组dmrs相关值的最大值,获得所述各个符号的起始位置对应的dmrs相关值峰值;确定所述各个符号的起始位置对应的dmrs相关值峰值中的最大值,根据所述最大值确定所述目标时隙的起始位置和时隙号;其中,n为一个无线帧所包含的时隙数。15.一种时隙同步检测装置,其特征在于,包括:符号头检测单元,用于接收频分双工fdd信号,基于所述fdd信号,获取目标数据,对所述目标数据进行基于循环前缀cp的滑动相关计算,确定目标时隙的各个符号的起始位置;频偏补偿单元,用于对所述目标数据进行频偏估计和补偿,获得频偏估计和补偿后的数据;导频符号数据提取单元,用于将所述目标时隙的各个符号的起始位置作为假设的时隙起始位置,对所述频偏估计和补偿后的数据进行解调参考信号dmrs符号数据提取,获得各个符号的起始位置对应的导频符号数据,将所述导频符号数据变换到频域,获得频域导频符号数据;时隙位置确定单元,用于将所述频域导频符号数据与本地dmrs符号数据进行相关计算,获得多个dmrs相关值,基于所述多个dmrs相关值,确定所述目标时隙的起始位置和时隙号。16.一种处理器可读存储介质,其特征在于,所述处理器可读存储介质存储有计算机程序,所述计算机程序用于使所述处理器执行权利要求1至7任一项所述的时隙同步检测方法。
技术总结
本申请实施例提供一种时隙同步检测方法、设备、装置及存储介质,所述方法包括:获取FDD信号在一个无线帧内的目标数据并进行基于循环前缀CP的滑动相关计算,确定目标时隙的各个符号的起始位置;对目标数据进行频偏估计和补偿,获得频偏估计和补偿后的数据;基于目标时隙的各个符号的起始位置,对频偏估计和补偿后的数据进行DMRS提取,获得导频符号数据,将导频符号数据变换到频域,获得频域导频符号数据;将频域导频符号数据与本地DMRS符号数据进行相关计算,获得多个DMRS相关值,并确定目标时隙的起始位置和时隙号。本申请实施例可以准确、快速地实现5G NR FDD信号的同步。FDD信号的同步。FDD信号的同步。
技术研发人员:王少峰
受保护的技术使用者:大唐联仪科技有限公司
技术研发日:2020.09.24
技术公布日:2022/3/29
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。