技术特征:
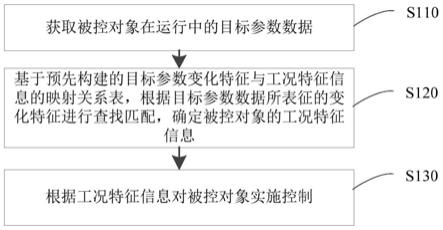
1.一种实现机械触觉的方法,其特征在于,包括:获取被控对象运行中的目标参数数据;基于预先构建的目标参数变化特征与工况特征信息的映射关系表,根据所述目标参数数据所表征的变化特征进行查找匹配,确定被控对象的工况特征信息;根据所述工况特征信息对被控对象实施控制。2.根据权利要求1所述的方法,其特征在于,所述获取被控对象在运行中的目标参数数据,包括:对被控对象的目标参数直接进行数据采集,获取所述目标参数数据;以及,基于所述被控对象的类型,对被控对象施加预设的控制手段后,再进行数据采集,获取被控对象在运行中的目标参数数据。3.根据权利要求2所述的方法,其特征在于,所述被控对象为电机牵引类设备;所述目标参数数据包括:电机滑差数据。4.根据权利要求3所述的方法,其特征在于,所述被控对象具体为行车吊具设备;所述获取被控对象运行中的目标参数数据,具体为:监测获取驱动电机的输入频率和输出转速,根据的所述输入频率和输出转速计算获取电机滑差数据。5.根据权利要求4所述的方法,其特征在于,所述基于预先构建的目标参数变化特征与工况特征信息的映射关系表,根据所述目标参数数据所表征的变化特征进行查找匹配,确认被控对象的工况特征信息,包括:对所述电机滑差数据进行解析,得到电机滑差变化特征,基于所述电机滑差变化特征,确定吊具设备的工况特征信息;其中,基于所述电机滑差变化特征,确定吊具设备的工况特征信息;包括:在吊具下降过程中,若所述电机滑差变化特征的为,处于超前状态,且超前的程度超出预设范围时,确认设备处于失速工况;以及,在吊具下降过程中,若电机滑差特征的为,处于超前状态,且滑差持续减小是,则确认设备处于接触到物料的工况,或发生意外碰触;以及,在吊具反接下降,被施加力矩限制的控制手段情况下,若电机滑差特征的为,滑差大于给定速度,则确认吊具处于正在下降的工况;以及,在吊具反接下降,被施加力矩限制的控制手段情况下,若电机滑差特征的为,滑差等于给定速度,则确认吊具处于零速悬停或吊具已落在物料面的工况,若进一步减小力矩,滑差仍等于给定速度,则确认吊具处于已落在物料面的工况;以及,在吊具反接下降,被施加力矩限制的控制手段情况下,若电机滑差特征的为,滑差小于给定速度,则确认吊具处于上升状态的工况。6.根据权利要求4所述的方法,其特征在于,所述预设的控制手段还包括:速度限制,反接制动,斜坡制动,自由停车,放摇摆。7.根据权利要求2所述的方法,其特征在于,所述被控对象为液压类设备时,所述目标参数数据包括:液压压力数据,液压流量数据,运动部件运动位置数据,以及运动部件运动速度数据;所述被控对象为气动类设备时,所述目标参数数据包括:气体压力数据,气体流量数据,运动部件运动位置数据,运动部件运动速度数据、运动部件运动频率数据。
8.根据权利要求2所述的方法,其特征在于,所述被控对象为吸引类风送设备时,所述目标参数数据包括:电机电流数据、吸料口与物料之间的距离,所述被控对象的工况特征信息包括:设备流量工况信息;所述被控对象为射吸类风送设备时,所述目标参数数据包括:进料口正负压数据、射吸腔及出风口流量数据,所述被控对象的工况特征信息包括:物料的进料量状况信息。9.根据权利要求2所述的方法,其特征在于,所述被控对象为超越离合器机构时,所述目标参数数据包括:输入轴速度数据和输出轴速度数据,所述被控对象的工况特征信息包括:工况是否正常信息;所述被控对象为逆止器机构时,所述目标参数数据包括:速度数据和频率数据,所述被控对象的工况特征信息包括:逆止销动作是否灵敏信息。10.一种电子设备,其特征在于,包括:存储器,其上存储有可执行程序;处理器,用于执行所述存储器中的所述可执行程序,以实现权利要求1-9中任一项所述方法的步骤。
技术总结
本申请涉及实现机械触觉的方法及电子设备,属于工程设备控制技术领域,本申请的方法包括,获取被控对象运行中的目标参数数据;基于预先构建的目标参数变化特征与工况特征信息的映射关系表,根据所述目标参数数据所表征的变化特征进行查找匹配,确定被控对象的工况特征信息;根据所述工况特征信息对被控对象实施控制。本申请的技术方案,实现了类似于生物触觉功能的机械触觉,可以更好的获知被控设备及机构在实际场景中的工作状态,进而有利于实现随机定位等控制方式,基于映射关系表构建汇总,可在更加广泛的适用范围内实现机械触觉。可在更加广泛的适用范围内实现机械触觉。可在更加广泛的适用范围内实现机械触觉。
技术研发人员:段采标
受保护的技术使用者:段采标
技术研发日:2021.12.21
技术公布日:2022/3/25
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。