技术特征:
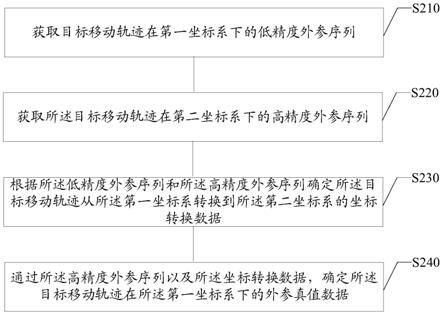
1.一种轨迹外参真值确定方法,其特征在于,包括:获取目标移动轨迹在第一坐标系下的低精度外参序列;获取所述目标移动轨迹在第二坐标系下的高精度外参序列;根据所述低精度外参序列和所述高精度外参序列确定所述目标移动轨迹从所述第一坐标系转换到所述第二坐标系的坐标转换数据;通过所述高精度外参序列以及所述坐标转换数据,确定所述目标移动轨迹在所述第一坐标系下的外参真值数据。2.根据权利要求1所述的轨迹外参真值确定方法,其特征在于,所述获取目标移动轨迹在第一坐标系下的低精度外参序列,包括:获取目标移动轨迹在第一坐标系下对应的惯性导航数据,以及获取与所述惯性导航数据关联的图像数据;基于所述惯性导航数据与所述图像数据确定所述目标移动轨迹在所述第一坐标系下的低精度外参序列。3.根据权利要求2所述的轨迹外参真值确定方法,其特征在于,所述基于所述惯性导航数据与所述图像数据确定所述目标移动轨迹在所述第一坐标系下的低精度外参序列,包括:基于所述惯性导航数据与所述图像数据进行即时定位处理,确定位姿数据;将所述位姿数据作为所述目标移动轨迹在所述第一坐标系下的低精度外参序列。4.根据权利要求2所述的轨迹外参真值确定方法,其特征在于,所述惯性导航数据是由惯导传感器设备采集的,所述图像数据是由与所述惯导传感器刚性连接的图像采集设备采集的。5.根据权利要求1所述的轨迹外参真值确定方法,其特征在于,所述根据所述低精度外参序列和所述高精度外参序列确定所述目标移动轨迹从所述第一坐标系转换到所述第二坐标系的坐标转换数据,包括:对所述低精度外参序列和所述高精度外参序列进行最小二乘拟合优化,得到最优解;将所述最优解作为所述目标移动轨迹从所述第一坐标系转换到所述第二坐标系的坐标转换数据。6.根据权利要求1或5所述的轨迹外参真值确定方法,其特征在于,所述高精度外参序列是由光学动作捕捉系统采集得到的。7.根据权利要求1或5所述的轨迹外参真值确定方法,其特征在于,所述高精度外参序列是由便携式激光雷达设备采集得到的。8.一种轨迹外参真值确定装置,其特征在于,包括:低精度数据获取模块,用于获取目标移动轨迹在第一坐标系下的低精度外参序列;高精度数据获取模块,用于获取所述目标移动轨迹在第二坐标系下的高精度外参序列;坐标转换数据确定模块,用于根据所述低精度外参序列和所述高精度外参序列确定所述目标移动轨迹从所述第一坐标系转换到所述第二坐标系的坐标转换数据;外参真值数据确定模块,用于通过所述高精度外参序列以及所述坐标转换数据,确定所述目标移动轨迹在所述第一坐标系下的外参真值数据。
9.一种计算机可读存储介质,其上存储有计算机程序,其特征在于,所述计算机程序被处理器执行时实现权利要求1-7任一项所述的方法。10.一种电子设备,其特征在于,包括:处理器;以及存储器,用于存储所述处理器的可执行指令;其中,所述处理器配置为经由执行所述可执行指令来执行权利要求1-7任一项所述的方法。
技术总结
本公开提供一种轨迹外参真值确定方法及装置、电子设备、存储介质;涉及定位导航技术领域。所述轨迹外参真值确定方法包括:获取目标移动轨迹在第一坐标系下的低精度外参序列;获取所述目标移动轨迹在第二坐标系下的高精度外参序列;根据所述低精度外参序列和所述高精度外参序列确定所述目标移动轨迹从所述第一坐标系转换到所述第二坐标系的坐标转换数据;通过所述高精度外参序列以及所述坐标转换数据,确定所述目标移动轨迹在所述第一坐标系下的外参真值数据。本公开可以通过标定目标移动轨迹的坐标转换数据确定外参真值数据,有效减少标定的外参真值数据的误差,提升标定的外参真值数据的准确度以及计算效率。真值数据的准确度以及计算效率。真值数据的准确度以及计算效率。
技术研发人员:金珂 李姬俊男 郭彦东
受保护的技术使用者:OPPO广东移动通信有限公司
技术研发日:2021.12.14
技术公布日:2022/3/22
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。