技术特征:
1.一种基于改进狼群算法的变压器混合极化模型参数辨识方法,所述混合极化模型在扩展德拜模型的基础上引入麦克斯韦界面极化支路;其特征在于,该方法包括以下步骤:对狼群算法进行改进,引入自适应步长,狼群每次移动的步长由狼群当前位置和头狼位置决定;令改进的狼群算法中狼群位置为混合极化模型的模型参数辨识值,构建基于模型参数辨识值和模型参数实测值的狼群捕猎函数;进行狼群狩猎活动,初始化狼群位置,基于狼群捕猎函数产生头狼,并进行狼群的探寻行为、狼群的号召行为和狼群的捕猎行为;根据“强者为王”的机制更新头狼的位置,并根据“弱肉强食”的机制对狼群进行更新换代;重复上述狼群狩猎活动进行狼群的迭代更新,设置迭代终止条件,判断是否达到预设的优化精度或最大迭代次数,达到迭代终止条件后,输出当前头狼的位置为最优的混合极化模型的模型参数辨识值。2.根据权利要求1所述的一种基于改进狼群算法的变压器混合极化模型参数辨识方法,其特征在于,在进行狼群狩猎活动步骤中:初始化狼群位置x,根据混合极化模型的模型参数计算公式以及狼群捕猎函数计算狼群中每匹狼的个体捕猎函数,并按照个体捕猎函数从大到小进行排序;选取个体捕猎函数最好的狼作为头狼,记头狼的位置为xd,头狼的个体捕猎函数记为pd;选取除头狼外,个体捕猎函数最好的n匹狼为探狼,进行狼群的探寻行为;所有探狼以步长h1向n方向移动一步,记下探狼移动后的个体捕猎函数pi;若pi大于pd,则将对应探狼替换为新的头狼,即令pd=pi,若pi小于pd,则探狼返回原位置,第j次移动后,探狼的位置为:选取除头狼与探狼外的m匹狼作为猛狼,进行狼群的号召行为;所有猛狼以步长h2向头狼方向移动,经过k 1次迭代后,第i匹猛狼在d维空间所处位置为:号召过程中,若一猛狼的个体捕猎函数pi大于头狼的个体捕猎函数pd,此时该猛狼会转化为头狼发起号召,即令pd=pi;若猛狼的个体捕猎函数pi小于头狼的个体捕猎函数pd,则猛狼继续向头狼方向移动,直至距离小于d:其中,w为距离判定因子;所有的探狼与猛狼联合进行狼群的捕猎行为,以步长h3对头狼所在位置进行围捕;对于k代狼群围捕行动为:x
ik 1
=x
ik
λ
×
h3×
|x
ik-x
dk
|;
其中,λ为[-1,1]内的随机数。3.根据权利要求2所述的一种基于改进狼群算法的变压器混合极化模型参数辨识方法,其特征在于,所述步长h1、h2和h3为所述自适应步长,其计算公式为:h
k
=rand
×
norm(x
i-x
d
);其中,rand为[0,1]内的随机数,norm为求矩阵范数;xi为第i匹狼的当前位置,xd为头狼的位置。4.一种电子设备,包括存储器、处理器及存储在存储器上并可在处理器上运行的计算机程序,其特征在于,所述处理器执行所述程序时实现如权利要求1至3任一项所述的变压器混合极化模型参数辨识方法。5.一种计算机可读存储介质,其上存储有计算机程序,其特征在于,该程序被处理器执行时实现如权利要求1至3任一项所述的变压器混合极化模型参数辨识方法。
技术总结
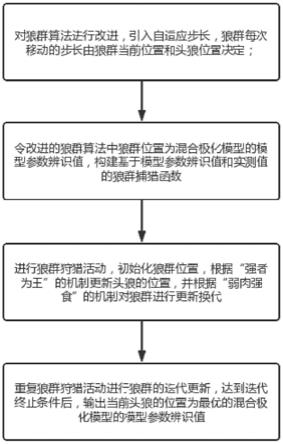
本发明涉及一种基于改进狼群算法的变压器混合极化模型参数辨识方法,包括以下步骤:对狼群算法进行改进,引入自适应步长,狼群每次移动的步长由狼群当前位置和头狼位置决定;令改进的狼群算法中狼群位置为混合极化模型的模型参数辨识值,构建基于模型参数辨识值和实测值的狼群捕猎函数;进行狼群狩猎活动,初始化狼群位置,基于狼群捕猎函数产生头狼,并进行狼群的探寻行为、狼群的号召行为和狼群的捕猎行为;根据“强者为王”的机制更新头狼的位置,并根据“弱肉强食”的机制对狼群进行更新换代;重复上述狼群狩猎活动进行狼群的迭代更新,达到迭代终止条件后,输出当前头狼的位置为最优的混合极化模型的模型参数辨识值。为最优的混合极化模型的模型参数辨识值。为最优的混合极化模型的模型参数辨识值。
技术研发人员:林明星 郑宇 林翊乾 陈扩松 潘亦斌 李语菲
受保护的技术使用者:国网福建省电力有限公司
技术研发日:2021.12.01
技术公布日:2022/3/21
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。