技术特征:
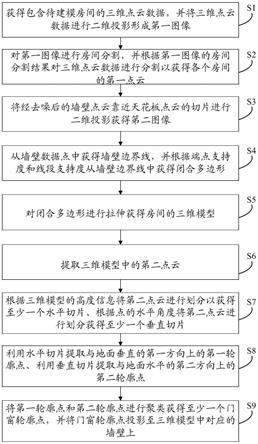
1.一种三维重建方法,其特征在于,包括:获得包含待建模房间的三维点云数据,并将所述三维点云数据进行二维投影形成第一图像;对所述第一图像进行房间分割,并根据所述第一图像的房间分割结果对所述三维点云数据进行分割以获得各个房间的第一点云;其中,所述第一点云包括墙壁点云、天花板点云;将经去噪后的墙壁点云靠近所述天花板点云的切片进行二维投影获得第二图像;其中,所述第二图像中包括多个墙壁数据点;从所述墙壁数据点中获得墙壁边界线,并根据端点支持度和线段支持度从所述墙壁边界线中获得闭合多边形;对所述闭合多边形进行拉伸获得所述房间的三维模型。2.根据权利要求1所述的三维重建方法,其特征在于,所述从所述墙壁数据点中获得墙壁边界线,并根据端点支持度和线段支持度从所述墙壁边界线中获得闭合多边形的步骤,包括:对每个所述墙壁数据点提取直线,并将所有所述直线进行合并获得至少一个直线集合;其中,所述直线集合包括至少一条属于同一墙壁的直线;对所述直线集合中的直线求交获得所述墙壁边界线;根据所述端点支持度和所述线段支持度从所述墙壁边界线中筛选出最优线段;其中,所述端点支持度为每个端点所连接的所述线段支持度大于零的线段的条数,所述线段支持度为包围盒内每个内点的可信度加权值与包围盒内所有内点的点云密度的乘积;删除除所述最优线段之外的多余线段并补足所述最优线段的缺失部分以获得所述闭合多边形;其中,所述闭合多边形的每个端点支持度均为二。3.根据权利要求2所述的三维重建方法,其特征在于,所述根据所述端点支持度和所述线段支持度从所述墙壁边界线中筛选出最优线段的步骤之前,包括:利用所述墙壁边界线的端点获得包围盒,其中,所述包围盒中包括至少一个内点;获得所述内点与所述墙壁边界线之间的第一距离和第一阈值之间的比值、一与所述比值之间的差值,并获得所述差值与所述内点的协方差矩阵之间的乘积,并将所述包围盒内所有所述内点的乘积的和值作为所述可信度加权值;其中,所述第一距离小于或等于所述第一阈值。4.根据权利要求1所述的三维重建方法,其特征在于,所述将经去噪后的墙壁点云靠近所述天花板点云的切片进行二维投影获得第二图像的步骤之前,包括:将所述房间的第一点云进行分割以获得各个所述房间中的墙壁点云;根据预设角度间隔将所述墙壁点云进行角度切片以获得所述墙壁点云与各个所述房间内所有第一点云的中心点之间的第二距离;根据所述第二距离和预设距离间隔将所述墙壁点云进行距离切片;利用经双重切片后墙壁点云的数量去除各个所述房间内的稀疏噪点和代表水平平面的点云。5.根据权利要求1所述的三维重建方法,其特征在于,所述对所述闭合多边形进行拉伸获得所述房间的三维模型的步骤之后,包括:
提取所述三维模型中的第二点云;其中,所述第二点云属于所述三维模型中的墙壁;根据所述三维模型的高度信息将所述第二点云进行划分以获得至少一个水平切片、根据点的水平角度将所述第二点云进行划分获得至少一个垂直切片;利用所述水平切片提取与地面垂直的第一方向上的第一轮廓点、利用所述垂直切片提取与所述地面水平的第二方向上的第二轮廓点;将所述第一轮廓点和所述第二轮廓点进行聚类获得至少一个门窗轮廓点,并将所述门窗轮廓点投影至所述三维模型中对应的墙壁上。6.根据权利要求5所述的三维重建方法,其特征在于,所述利用所述水平切片提取与地面垂直的第一方向上的第一轮廓点的步骤,包括:根据所述水平切片内的第二点云的水平角将所述水平切片内的墙壁点云进行排序,并获得所述水平切片内的墙壁点云与其相邻墙壁点云之间的第三距离;响应于所述第三距离满足第二阈值,将所述相邻第二点云作为所述第一轮廓点;所述利用所述垂直切片提取与所述地面水平的第二方向上的第二轮廓点的步骤,包括:根据所述垂直切片内的第二点云的高度值将所述垂直切片内的墙壁点云进行排序,并获得所述垂直切片内的墙壁点云与其相邻墙壁点云之间的第四距离;响应于所述第四距离满足第三阈值,将所述相邻第二点云作为所述第二轮廓点。7.根据权利要求5所述的三维重建方法,其特征在于,所述将所述第一轮廓点和所述第二轮廓点进行聚类获得至少一个门窗轮廓点,并将所述门窗轮廓点投影至所述三维模型中对应的墙壁上的步骤之后,包括:根据所在墙壁的方向将所述第一轮廓点和所述第二轮廓点进行排序,并根据排序结果获得首部轮廓点和尾部轮廓点;根据高度值将所述第一轮廓点和所述第二轮廓点进行排序,并根据排序结果获得最高轮廓点和最低轮廓点;将所述首部轮廓点、尾部轮廓点、最高轮廓点和最低轮廓点进行初次拟合以获得初始包围矩形;利用所述初始包围矩形的四条边提取靠近每条边的门窗轮廓点,并利用随机抽样一致性算法对每条边进行二次拟合;响应于二次拟合之后的图形为四边形,输出所述初始包围矩形。8.根据权利要求1所述的三维重建方法,其特征在于,所述对所述第一图像进行房间分割,并根据所述第一图像的房间分割结果对所述三维点云数据进行分割以获得各个房间的第一点云的步骤,包括:将所述第一图像进行二值化获得各个所述房间之间的空隙,并利用边缘提取算法获得所述空隙的边缘;利用图像膨胀和图像闭运算将所述边缘细化;将所述边缘进行霍夫变换获得所述边缘对应的线段,并对所述线段进行优化以合并属于同一墙壁边界的直线;将经拓宽后的线段和所述第一图像进行图像减运算获得第三图像;其中,所述第三图像包括所述房间和所述墙壁边界线;
根据所述墙壁边界线将所述房间进行分割,并分隔各个所述房间对应的第一点云。9.根据权利要求8所述的三维重建方法,其特征在于,所述根据所述墙壁边界线将所述房间进行分割,并分隔各个所述房间对应的第一点云的步骤之前,还包括:响应于所述第三图像中存在噪点,将所述噪点去除并进入至根据所述墙壁边界线将所述房间进行分割,并分隔各个所述房间对应的第一点云的步骤。10.根据权利要求1所述的三维重建方法,其特征在于,所述将所述三维点云数据进行二维投影形成第一图像的步骤之前,包括:对所述三维点云数据进行预处理。11.一种三维重建系统,其特征在于,包括相互耦接的存储器和处理器,所述存储器内存储有程序指令,所述处理器用于执行所述程序指令以实现权利要求1至10中任一项所述的三维重建方法。12.一种计算机可读存储介质,其特征在于,所述计算机可读存储介质存储有计算机程序,所述计算机程序用于实现权利要求1至10任一项所述的三维重建方法。
技术总结
本申请公开了一种三维重建方法以及相关装置,该方法包括:获得包含待建模房间的三维点云数据,将三维点云数据进行二维投影形成第一图像;对第一图像进行房间分割,并根据第一图像的房间分割结果对三维点云数据进行分割以获得各个房间的第一点云;其中,第一点云包括墙壁点云、天花板点云;将经去噪后的墙壁点云靠近天花板点云的切片进行二维投影获得第二图像;其中,第二图像中包括多个墙壁数据点;从墙壁数据点中获得墙壁边界线,并根据端点支持度和线段支持度从墙壁边界线中获得闭合多边形;对闭合多边形进行拉伸获得房间的三维模型。通过这样的设计方式,可以保证墙壁重建的准确性,从而得到房间较为准确的三维重建模型。型。型。
技术研发人员:赵梦娜 余言勋
受保护的技术使用者:浙江大华技术股份有限公司
技术研发日:2021.11.09
技术公布日:2022/3/21
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。