技术特征:
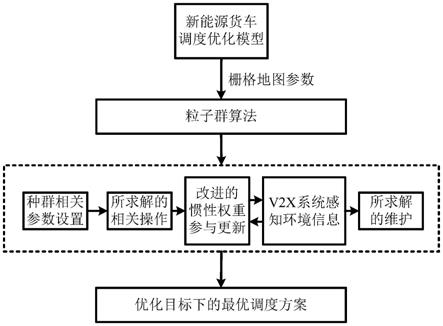
1.一种基于智能网联环境下新能源货车的优化调度方法,其特征在于,包括以下步骤:a.由新能源货车的应用场景建立环境地图;b.基于该环境地图建立新能源货车的调度优化模型,其中调度优化模型包括以新能源货车总的路径长度和新能源货车总的路径平滑度,以及约束条件;c.采用粒子群算法对b步骤中的调度优化模型进行求解,其中粒子群算法包括改进的惯性权重,“先验性”的路径编码,以及v2x系统动态的环境感知;d.判断c步骤中的动态环境感知检测应用环境是否发生变化;e.若环境发生变化则障碍信息输入得到粒子群的更新中,反之则不输入;f.在c步骤,d步骤,e步骤的基础上由粒子群算法求得的解集结合场景下的实际需能够得到应用场景下的新能源货车的优化调度最佳方案。2.根据权利要求1所述的一种基于智能网联环境下新能源货车的优化调度方法,其特征在于,所述a步骤中的环境地图包括栅格法建图与序号法对栅格地图进行编号。3.根据权利要求2所述的一种基于智能网联环境下新能源货车的优化调度方法,其特征在于,所述序号法的编号公式为:其中mod为取余运算,ceil向正无穷大取整运算,i为栅格序号,n
x
每行个数,n
y
每列个数,其中n=n
x
·
n
y
。4.根据权利要求3所述的一种基于智能网联环境下新能源货车的优化调度方法,其特征在于,所述b步骤中的调度优化模型为:min f(x)=(f1(x),f2(x))其中,f1是以总路径长度为优化目标,f2是以总路径平滑度为优化目标,n为新能源货车的辆数,m为每辆新能源货车对应的路径的段数g
kj
与g
k(j 1)
为栅格图中相邻的两个栅格,θ为当前路径点与上一路径点和下一路径点所组成的夹角,g
kj
当前所在栅格位置。5.根据权利要求4所述的一种基于智能网联环境下新能源货车的优化调度方法,其特征在于,所述b步骤中的约束条件为:其中p
a
与p
b
为同一时刻相邻的两辆新能源货车,o
c
表示障碍物栅格的中心位置。6.根据权利要求5所述的一种基于智能网联环境下新能源货车的优化调度方法,其特征在于,所述c步骤中的改进的惯性权重为:
其中it为当前迭代次数,it
max
为最大迭代次数,w
max
与w
min
分别为惯性权重的最大和最小值,w
it
为当前的迭代值,rand(w
it
/w
max
)为扰动项。7.根据权利要求6所述的一种基于智能网联环境下新能源货车的优化调度方法,其特征在于,所述c步骤中的“先验性”的路径编码为;ming(θ)=(θ1,θ2,θ3,lθ
n
);其中所述g(θ)为路径编码中基于当前路径位置在对下一位置的选择的最佳位置。8.根据权利要求7所述的一种基于智能网联环境下新能源货车的优化调度方法,其特征在于,所述c步骤中的v2x系统动态的环境感知为:2x系统动态的环境感知为:其中n=1,2,3l n,n为决策空间维数即新能源货车的数量,与表示在种群进行到第t次迭代时,编号为i的粒子在当前迭代中的第n辆新能源货车上的求解时粒子的速度与位置,速度是表示该粒子保持其上次迭代时求解的运动趋势,而位置表示该粒子在该次迭代时在该辆新能源货车的解,其形式为r1={r
11
,r
12
,l,r
1m
},r1是引入“先验性”路径编码后的得到的,与分别为个体和全局最优值,其形式与r1相同,λ1与λ2为学习因子,表示自我(个体)学习与社会(全局)学习的因数,其为[0,1]上的随机数,和为下一次迭代时的速度与位置,为v2x系统所获取到的信息,而对n辆新能源货车通过算法最终求得非支配解集的中单个最优解其形式为rr=[r1,r2l r
n
]。
技术总结
本发明公开了一种基于智能网联环境下新能源货车的优化调度方法。该方法在研究多辆新能源货车多目标优化问题的基础上,建立调度优化模型,其中调度模型是以总能源为优化前提,将总路径总长度和总路径平滑度作为目标函数,采用粒子群算法对模型求解,为改善粒子群算法易陷入局部最优的状况,提出的改进惯性权重使惯性权重呈非线性递减;并设计具有“先验性”的路径编码的方法,优化路径编码效率,最后求得模型的解。本发明能够提高求解的准确性与高效性,为新能源货车提供最佳调度方案。为新能源货车提供最佳调度方案。为新能源货车提供最佳调度方案。
技术研发人员:郑睿 赵传超 龚莉 马小陆 李操
受保护的技术使用者:安徽师范大学
技术研发日:2021.12.15
技术公布日:2022/3/18
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。