技术特征:
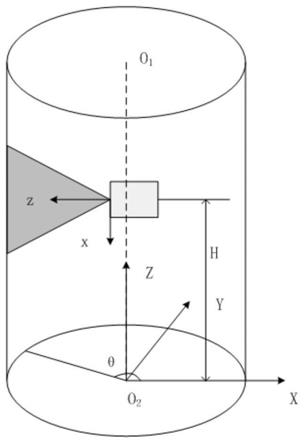
1.一种压力容器主螺栓孔螺纹三维重建及缺陷自动识别方法,其特征在于,包括如下步骤:步骤1)扫描获取螺纹表面二维坐标;步骤2)螺纹表面二维坐标信息、扫描装置的角度数据和轴向位置数据合成为三维坐标数据,即三维点云数据;步骤3)三维点云数据预处理,确定三维点云数据法向量,并将三维点云数据划分为平滑区域和尖锐区域,并分别进行滤波去噪;步骤4)对三维点云数据进行精简,保留大于阈值的数据;步骤5)进行被测目标三维曲面重建,生成网格模型;步骤6)缺陷识别与测量,将缺陷特征用参数表征,输出缺陷类型。2.如权利要求1所述的一种压力容器主螺栓孔螺纹三维重建及缺陷自动识别方法,其特征在于,所述的步骤1)具体为:首先,建立两个坐标系:一个是扫描装置自身参考点为原点的oxz坐标系,所测得的螺纹表面二维数据为oxz坐标系下点坐标,表征为(x,z);另一个是螺孔o2xyz坐标系,o2表示螺孔底部平面的圆心,z为螺孔轴心向上的方向,x为压力容器所在螺孔中心顺时针的切线方向,y为指向压力容器中心的方向,该坐标轴方向定义符合右手法则;h表示扫描装置相对于螺孔底部的高度,θ代表当前坐标系下扫描装置在oxy平面上的投影角度;进行待测螺孔标号和扫描装置定位安装之后,扫描头下降到螺纹起始段,旋转一周,同步采集二维数据,扫描头上升至顶部,移动扫描装置继续完成所有螺孔的扫描,获得所有螺孔的二维坐标信息。3.如权利要求2所述的一种压力容器主螺栓孔螺纹三维重建及缺陷自动识别方法,其特征在于:所述的扫描装置为线结构光扫描仪,将线结构光扫描仪安装在进行定位的车体上,通过车体在压力容器法兰面上沿着不同螺孔的位置移动,实现对每个螺孔扫描,在到达某个编号下的螺孔位置时,首先进行车体定位,保证扫描时车体位置相对压力容器固定。4.如权利要求2所述的一种压力容器主螺栓孔螺纹三维重建及缺陷自动识别方法,其特征在于:扫描头上升至顶部之前,需要判定扫描头是否到达螺孔底部,如果未到达顶部,则将扫描头下降,之后再重新旋转一周,同步采集二维数据,直到到达底部。5.如权利要求1所述的一种压力容器主螺栓孔螺纹三维重建及缺陷自动识别方法,其特征在于,所述的步骤2)具体为:螺纹表面的二维数据,在oxz坐标系下其坐标表征为(x,z),扫描装置参考点与螺孔中心的距离为常数,表示为d,可以得到三维点云数据,即(x,z)在o2xyz坐标系下的坐标,表示为:x=(z d)*cosθy=(z d)*sinθz=h x。6.如权利要求1所述的一种压力容器主螺栓孔螺纹三维重建及缺陷自动识别方法,其特征在于,所述的步骤3)具体为:步骤3.1)对获取的点云数据构建k邻域,计算点云法向量利用pca法进行点云法向量估算,得到距离点云数据中采样点p
i
最近的k个采样点的集
合;步骤3.2)计算采样点到其k邻域内局部切平面的法向距离,根据距离阈值将采样点进行特征分类,将三维点云数据划分为平滑区域和尖锐区域,采样点到领域内局部切平面的法向距离小于或等于阈值的定义为平滑区域,大于阈值的定义为尖锐区域;步骤3.3)分别对平滑区域和尖锐区域进行滤波去噪。7.如权利要求6所述的一种压力容器主螺栓孔螺纹三维重建及缺陷自动识别方法,其特征在于:针对尖锐区域采用双边滤波算法滤波去噪具体采用下式:其中,p
i
是点云集中当前待处理的点,p
j
是p
i
邻域内的点,n
i
、n
j
分别为p
i
、p
j
的法向量,α为双边滤波因子;w
c
为空间域的高斯核函数,w
s
为频率域的高斯核函数;滤波后的点云数据表示为:p
′
i
=p
i
α
·
nn为采样点切平面的法向量,p
′
i
表示滤波后的点云位置。8.如权利要求6所述的一种压力容器主螺栓孔螺纹三维重建及缺陷自动识别方法,其特征在于:针对平滑区域采用加权局部最优投影算法滤波去噪,具体为:利用局部信息来对点云数据进行局部增强,通过引入密度权重函数产生分布更均匀的点集,改善点云分布的均匀性和表面光顺度,其迭代公式为:点集,改善点云分布的均匀性和表面光顺度,其迭代公式为:点集,改善点云分布的均匀性和表面光顺度,其迭代公式为:其中,u为常数,p表示最原始的点云位置,p
′
表示迭代后新位置,k为邻接顶点的个数,p
j
表示原始点云的当前采样点,p
′
j
表示采样点迭代运算后的输出值;a
j
和β
i
分别为相关的权
值系数,σ点云当前点在邻域内的标准差,e表示自然常数。9.如权利要求1所述的一种压力容器主螺栓孔螺纹三维重建及缺陷自动识别方法,其特征在于,所述的步骤4)具体为:首先,通过基于最小二乘法的球面线性方程的方法,利用下式估算步骤3滤波去噪后的点云数据的曲率f(x0,y0,z0,c),其中,p
i
(x
i
,y
i
,z
i
)(i=1,2,...,n)为球面上的点x
i
、y
i
、z
i
在o2xyz坐标系下的坐标),o(x0,y0,z0)为球中心坐标,r为球的半径,c为待求解常数,n表示拟合球面点的个数,将相邻点云集中以p
i
(x
i
,y
i
,z
i
)为中心的相邻点的点坐标代入上式中,得到系列方程组,通过最小二乘法可计算得到c;然后,建立局部坐标系,将原点进行平移,得到其在新建局部坐标系的空间坐标,最后求解未知参数,计算曲率;最后,通过曲率值与设定阈值大小进行比较,大于阈值则保留,小于阈值则舍弃。10.如权利要求1所述的一种压力容器主螺栓孔螺纹三维重建及缺陷自动识别方法,其特征在于,所述的步骤5)具体为:步骤5.1)进行法向量估算,并加权修正其中,n为采样点切平面的法向量,d表示点到拟合平面的距离,k为邻域点数量,p
i
为当前采样点,w(p
i
)为加权权值,表达式为:)为加权权值,表达式为:为p
i
的k邻域重心;步骤5.2)进行点云分割并返回分块集对于点云数据集p预期分割为k个区域,首先从点云数据中随机选取k个点,作为k个分割区域的初始中心,计算点云中的每一个点到k个初始分割中心的欧式距离,将其划分到距离最近的初始分割中心所代表的分割区域,然后调整每个分割区域的中心,迭代以上计算过程,直到所有区域中心不再发生变化,则停止迭代,分割过程结束,输出区域分割结果;步骤5.3)进行分块稀疏和重采样按照分割之后的块区域,分别计算每个区域内点的曲率,并计算区域内曲率的平均值,若取样点的曲率小于平均值,则舍去该点,否则保留原始点的采样;步骤5.4)计算节点函数实现平滑优化节点函数f0的基函数表示为:
其中,σ为高斯滤波标准差;步骤5.5)计算分块的最大八叉树的深度给定全局八叉树最大深度为d
max
,最小深度为d
min
,则每个点云分块的局部八叉树最大深度可表示为:其中曲率均值表示为步骤5.6)等值面提取,获得任意体素中的等值面的三角面片表示判断其顶点是位于等值面之外,还是位于等值面之内,再根据顶点的状态,确定等值面的剖分模式;如体素顶点的数据值大于或等于等值面的值,则定义该顶点位于等值面之外,记为正点,即1;如体素顶点的数据值小于等值面的值,则定义该顶点位于等值面之内,记为负点,即0;每个体素共有8个顶点,且每个顶点有正负两种状态,等值面一共能够以256种方式与一个体素相交,形成任意体素中的等值面的三角面片表示;步骤5.7)生成网格模型根据8个顶点有向距离场的正负情况,得到三角面片,三角面片的顶点的坐标,也就是体素点边与待重建曲面的相交点,通过体素点边的两个顶点进行线性插值得到。11.如权利要求1所述的一种压力容器主螺栓孔螺纹三维重建及缺陷自动识别方法,其特征在于,所述的步骤6)具体为:步骤6.1)建立缺陷识别目标函数:其中,是标准模型下的点云,是待配准的点云,r是旋转矩阵,t是平移矩阵,n
p
为标准模型下的点云数量;利用最小二乘法计算最优的r和t;然后进行迭代,直到f(r,t)的计算值最小;步骤6.2)进行缺陷区域聚类分割并提取特征根据距离值确定表面缺陷的位置偏差距离的平均值表示为:其中d
i
表示点到点云模型曲面的距离;判断所有点的偏差距离与平均值的大小,将d
i
>d
mean
时d
i
对应的点x
i
存入类x中,遍历所有点,从而将点云模型表面偏差距离较大的区域分割出来;步骤6.3)将缺陷特征用参数表征,求解缺陷的面积、周长、长宽比,最后输出缺陷类型。
12.如权利要求11所述的一种压力容器主螺栓孔螺纹三维重建及缺陷自动识别方法,其特征在于:缺陷的面积是对区域的大小进行度量的几何特征,计算方法为:a
s
=n
d
a
s
表示缺陷区域面积,s表示度量的缺陷区域,n
d
表示缺陷区域的点云数目;缺陷的周长是指包围某个缺陷区域的边界轮廓线长度,计算方法为:l
s
=n
e
l
s
表示缺陷区域的周长,n
e
表示缺陷区域边界特征的数目。缺陷的长宽比用于对形状进行度量,其计算方法如下:
技术总结
本发明属于核电厂设备检修技术,具体涉及一种压力容器主螺栓孔螺纹三维重建及缺陷自动识别方法。扫描获取螺纹表面二维坐标,合成三维点云数据,确定三维点云数据法向量,三维点云数据划分为平滑区域和尖锐区域,并分别进行滤波去噪,精简后保留大于阈值的数据,进行被测目标三维曲面重建,生成网格模型,缺陷识别与测量,将缺陷特征用参数表征,输出缺陷类型。利用线结构光扫描仪获取螺纹表面二维坐标,根据编码器得到的螺纹高度信息、角度信息,并通过系统标定参数计算三维坐标,对三维点云数据滤波、螺纹曲面重建及缺陷自动识别。按照本方法可以全自动完成所有螺孔的数据采集及分析和处理,单孔运行时间不超过5min。单孔运行时间不超过5min。单孔运行时间不超过5min。
技术研发人员:付小军 王凯 张闰 窦普 周杨 曹晔 刘辉 姜立伟 李玉东 吴鑫 赵京京 江铭铭 赵师节 邓玉 任煜
受保护的技术使用者:中国科学院光电技术研究所
技术研发日:2021.11.12
技术公布日:2022/3/18
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。