技术特征:
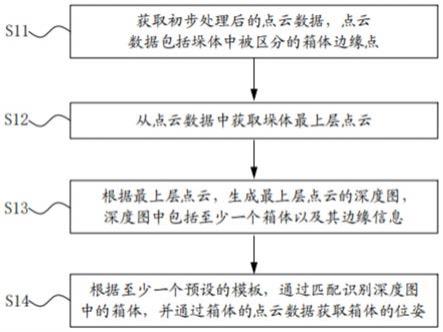
1.一种箱体的位姿识别方法,其特征在于,所述箱体的位姿识别方法包括:获取初步处理后的点云数据,所述点云数据包括垛体中被区分的箱体边缘点;从所述点云数据中获取垛体最上层点云;根据所述最上层点云,生成所述最上层点云的深度图,所述深度图中包括至少一个箱体以及其边缘信息;根据至少一个预设的模板,通过匹配识别所述深度图中的箱体,并通过所述箱体的点云数据获取所述箱体的位姿。2.如权利要求1所述的方法,其特征在于,所述获取初步处理后的点云数据的步骤,包括:获取包含所述垛体的初始点云数据和图像,所述初始点云数据和图像存在对应关系;获取所述图像中箱体的边缘轮廓信息,以获取所述箱体边缘点的像素坐标;根据所述像素坐标获取对应的边缘点云数据,并将其设置为无效数据。3.如权利要求2所述的方法,其特征在于,所述获取初步处理后的点云数据的步骤,还包括:根据预设的空间过滤范围,对所述初始点云数据进行过滤处理,以获取所述垛体的点云数据。4.如权利要求1所述的方法,其特征在于,所述从所述点云数据中获取垛体最上层点云的步骤,包括:旋转所述点云数据,使得点云坐标系z轴垂直于垛体平面;根据所述点云数据中z值的分布,设立z值的间隔区间;获取至少一个所述间隔区间内的点云作为最上层点云。5.如权利要求4所述的方法,其特征在于,所述获取至少一个所述间隔区间内的点云作为最上层点云的步骤,包括:遍历所述间隔区间,获取所述间隔区间内的点云数量;当所述点云数量大于设定的数量阈值时,结束遍历,提取当前区间内的点云,作为最上层点云。6.如权利要求4所述的方法,其特征在于,所述旋转所述点云数据的步骤,包括:根据预设的旋转矩阵旋转所述点云数据,所述旋转矩阵为相机坐标系到垛体平面的旋转矩阵。7.如权利要求1所述的方法,其特征在于,所述预设的模板包括:根据所述箱体的尺寸,确认或生成的所述箱体的图像模板;和/或根据所述箱体的尺寸范围和预设策略函数,确认或生成的满足所述尺寸范围的多个图像模板。8.一种箱体的位姿识别装置,其特征在于,包括:数据获取模块、点云提取模块、深度图生成模块和识别模块;所述数据获取模块,获取初步处理后的点云数据,所述点云数据包括垛体中被区分的箱体边缘点;所述点云提取模块,用于从所述点云数据中获取垛体最上层点云;所述深度图生成模块,用于根据所述最上层点云,生成所述最上层点云的深度图,所述
深度图中包括至少一个箱体以及其边缘信息;所述识别模块,用于根据至少一个预设的模板,通过匹配识别所述深度图中的箱体,并通过所述箱体的点云数据获取所述箱体的位姿。9.一种终端,其特征在于,所述终端包括:存储器、处理器;其中,所述存储器上存储有箱体的位姿识别程序,所述箱体的位姿识别程序被所述处理器执行时实现如权利要求1至7中任一项所述的箱体的位姿识别方法的步骤。10.一种存储介质,其特征在于,所述存储介质上存储有计算机程序,所述计算机程序被处理器执行时实现如权利要求1至7中任一项所述的箱体的位姿识别方法的步骤。
技术总结
本发明提供了一种箱体的位姿识别方法及装置、终端、存储介质,箱体的位姿识别方法包括:获取初步处理后的点云数据,所述点云数据包括垛体中被区分的箱体边缘点;从所述点云数据中获取垛体最上层点云;根据所述最上层点云,生成所述最上层点云的深度图,所述深度图中包括至少一个箱体以及其边缘信息;根据至少一个预设的模板,通过匹配识别所述深度图中的箱体,并通过所述箱体的点云数据获取所述箱体的位姿。本发明通过包括箱体边缘点的点云数据,获取最上层点云的深度图,能减少数据处理量,且能够快速识别箱体边缘,从而更易于识别出垛体中的箱体的位姿。出垛体中的箱体的位姿。出垛体中的箱体的位姿。
技术研发人员:邓岳慈 孙斌 李辉 邱强
受保护的技术使用者:深圳市如本科技有限公司
技术研发日:2021.11.24
技术公布日:2022/3/7
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。