技术特征:
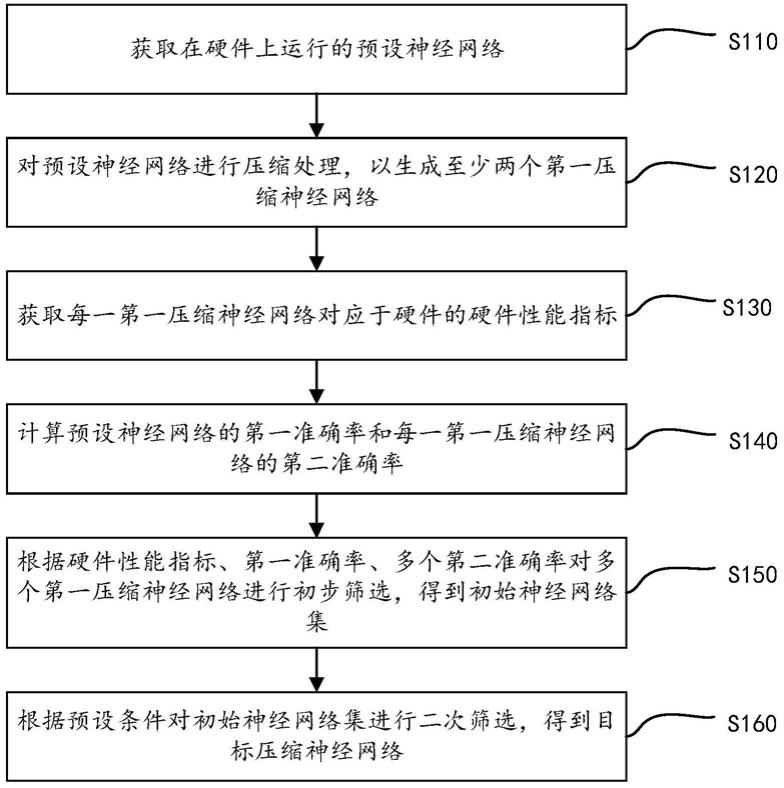
1.一种基于深度语义分割网络和图像矫正的高速路遮光板倾斜识别方法,其特征在于,该方法将高分辨相机采集的高速路上遮光板图像输入至深度残差神经网络模型,实现对遮光板区域的像素级精细分割,进而对同一幅图像内多个遮光板区域,通过去估计最大外接多边形,根据顶点之间的距离确定最优外接四边形,进而通过仿射变换完成遮光板区域矫正;最后,利用最小二乘估计每个遮光板的姿态方向,实现对倾斜遮光板的识别定位。2.如权利要求1所述的方法,其特征在于,具体包括以下步骤:步骤一,构建深度残差神经网络模型,所述深度残差神经网络模型包括主干特征提取网络、空洞空间池化金字塔模块、后处理模块、二次点预测模块;将高分辨相机采集的高速路上遮光板图像输入至残差神经网络模型,由神经网络模型输出特征图,然后对输出特征图进行2倍双线性插值,得到粗预测图;在得到粗预测图上挑选出n个不确定性最高的点,并对于每个不确定性最高点获取其表征向量,该表征向量由低层特征向量和高层特征向量组成;其中,低层特征向量通过在粗预测图的特征向量图上进行双线性插值获得,高层特征向量即为不确定点在粗预测图上的特征向量,然后使用一个小的神经网络对表征向量计算得到更新的粗预测图;将预测结果替换粗糙预测结果中的不稳定值,不断重复上述步骤,直到输出结果尺寸与原图大小一致;步骤二,计算遮光板区域的凸包,具体计算方法如下:1)假设每个遮光板边缘区域是由n个像素组成,构成了集合e,且e={p
k
|k=1,2,
…
,n},首先以集合e左下角像素p1为起点,然后将其它边缘像素p
k
,k=2,3,
…
,n与p1进行连线,计算连线与水平方向的夹角,并按照夹角大小排序;2)排序后的像素集合为针对中像素若顺时针转向说明是凸包顶点,保留像素否则,从中删除像素直到中所有像素都被遍历且判决,最终保留下来的就是二维凸包的顶点;3)对像素集合中的所有像素,得到遮光板区域的二维凸包;步骤三,基于最小二乘姿态估计的遮光板倾斜识别,具体识别方法如下:1)假设一幅图像中共有m个遮光板,其中第j个遮光板的中心线为二维空间中一条直线,根据均方误差构建误差目标函数线,根据均方误差构建误差目标函数其中,为第j条直线截距,为第j条直线斜率,j∈{1,2,...,m},x
k
和y
k
分别为第k个边缘像素的横坐标和纵坐标;2)采用最小二乘法确定使得取最小值的最优解参数计算遮光板方向θ
j
;遍历图像中的m个遮光板,并生成遮光板姿态方向集合ω={θ1,θ2,...,θ
j
};3)当集合ω内θ
j
满足以下条件时,则判定第j个遮光板倾斜,并构建倾斜遮光板对应的位置索引集合u:
其中τ为阈值,
技术总结
本发明涉及一种基于深度语义分割网络和图像矫正的高速路遮光板倾斜识别方法,将高分辨相机采集的高速路上遮光板图像输入至深度残差神经网络模型,实现对遮光板区域的像素级精细分割,进而对同一幅图像内多个遮光板区域,通过去估计最大外接多边形,根据顶点之间的距离确定最优外接四边形,进而通过仿射变换完成遮光板区域矫正;最后,利用最小二乘估计每个遮光板的姿态方向,实现对倾斜遮光板的识别定位。相比传统图像分割方法,该方法使用的目标分割模型对目标细节分割质量更优,对背景干扰十分鲁棒。通过顶点距离快速确定外接四边形的方法简单高效,适用于对动态场景下的区域形状估计。通过在实测数据进行测试,验证了该方法的有效性和优越性。方法的有效性和优越性。方法的有效性和优越性。
技术研发人员:周祚峰 吴清泉
受保护的技术使用者:西安西光产业发展有限公司
技术研发日:2021.11.08
技术公布日:2022/3/7
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。