技术特征:
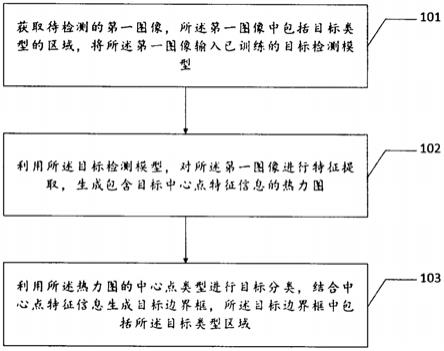
1.一种航拍图像目标检测方法,其特征在于,包括:获取待检测的第一图像,所述第一图像中包括目标类型区域,将所述第一图像输入已训练的目标检测模型;利用所述目标检测模型,对所述第一图像进行特征提取,生成包含目标中心点特征信息的热力图;利用所述热力图的中心点类型进行目标分类,结合中心点特征信息生成目标边界框,所述目标边界框中包括所述目标类型区域。2.根据权利要求1所述的航拍图像目标检测方法,其特征在于,所述获取待检测的第一图像之前,所述方法还包括:将所述的目标检测模型进行有监督训练,获取预设数量的训练图像,每张训练图像标注目标类别和边界框;将所述预设数量的训练图像分成训练数据、验证数据与测试数据;利用所述训练数据通过聚类操作进行分类并交替训练,通过特定目标区域信息丢失进行数据增强,生成模型权重;利用所述验证数据进行所述目标检测模型可行性验证;利用所述测试数据进行所述目标检测模型的有效性测试。3.根据权利要求1所述的航拍图像目标检测方法,其特征在于,所述目标检测模型包括特征提取网络与反卷积级联网络;所述利用所述目标检测模型,对所述第一图像进行特征提取,生成包含目标中心点特征信息的热力图,包括:将所述第一图像输入所述特征提取网络获取特征图;将所述特征图输入到所述反卷积级联网络得到特征像素级分布的热力图。4.根据权利要求3所述的航拍图像目标检测方法,其特征在于,所述特征提取网络包括:卷积层、池化层、残差模块、空洞卷积模块;所述反卷积级联网络包括:反卷积模块、注意力模块、级联模块;所述将所述第一图像输入所述特征提取网络获取特征图,包括:所述卷积层包括三个3
×
3的小尺寸卷积核,所述池化层为最大值池化,所述残差模块由七个输入和输出之间进行级联的残差单元构成,所述空洞卷积模块以不同空洞率的卷积核提取多尺度信息,再将不同尺度信息级联经过一个卷积层输出所述特征图;所述将所述特征图输入到所述反卷积级联网络得到特征像素级分布的热力图,包括:所述反卷积模块在进行反卷积操作前先通过注意力机制进行空间和通道方面的加权,所述级联模块包括将残差模块的特征经过注意力模块输出得到的特征图与反卷积模块输出的特征图进行同分辨率级联,输出所述特征像素级分布的热力图。5.根据权利要求3所述的航拍图像目标检测方法,其特征在于,所述热力图携带的信息为预测目标中心点类别和热力图中心点坐标信息、目标尺寸信息、中心点离散偏移误差信息和自适应二值化阈值信息。6.根据权利要求5所述的航拍图像目标检测方法,其特征在于,所述利用所述热力图的中心点类型进行目标分类,结合中心点特征信息生成目标边界框,包括:在训练过程中将所述热力图与真实目标进行映射匹配,再根据匹配程度进行分类,得
到预测目标的种类信息;将所述热力图中心点坐标信息、所述自适应二值化阈值信息、所述目标尺寸信息、所述中心点离散偏移误差信息相结合进行边界框预测,生成所述目标边界框。7.根据权利要求6所述的航拍图像目标检测方法,其特征在于,所述在训练过程中将所述热力图与真实目标进行映射匹配,再根据匹配程度进行分类,得到预测目标的种类信息,包括:将真实标注的目标中心点坐标信息通过高斯核函数映射到预测的热力图上作为目标的关键点;若所述热力图上关键点坐标信息与真实信息相匹配,则所述种类信息与所述真实信息相同,若所述热力图上关键点坐标信息与真实信息不匹配则所述种类信息为背景信息。8.根据权利要求6所述的航拍图像目标检测方法,其特征在于,将所述热力图中心点坐标信息、所述自适应二值化阈值信息、所述目标尺寸信息、所述中心点离散偏移误差信息相结合进行边界框预测,生成所述目标边界框,包括:将分类后的热力图中心点坐标(x
′
,y
′
)加上中心点离散偏移误差后的值作为目标关键点中心位置的预测坐标(x,y);结合目标宽高尺寸信息(w,h)输出目标边界框信息(x-w/2,x w/2,y-h/2,y h/2);通过二值化阈值筛选后输出最终预测的所述目标边界框。9.一种终端设备,包括处理器、存储器以及计算机程序,其特征在于计算机程序储存在存储器上并在处理器上运行,实现权力1-8中任一项所述的航拍图像目标检测方法。10.一种计算机可读存储介质,其特征在于:所述计算机可读存储介质用于存储代码程序,所述代码程序执行权力1-8中任一项所述的航拍图像目标检测方法。
技术总结
本发明公开了一种航拍图像目标检测方法,涉及图像处理技术领域,用于解决航拍图像目标物体检测精确度低和实时性差的问题,包括以下步骤:将航拍图像输入目标检测模型,经由特征提取网络,得到特征表达能力强的特征图,经由反卷积级联网络,充分结合浅层空间信息和深层语义信息得到分辨率高且细节特征丰富的热力图;将热力图中心点作为关键点与真实目标的中心点匹配并进行分类和回归预测,输出航拍图像中待检测目标的类别和边界框尺寸。本发明网络结构简单,参数少,运行速度快,能精准定位航拍图像中的小目标物体同时进行准确的边界框回归。归。归。
技术研发人员:梁继然 许延雷 陈壮
受保护的技术使用者:天津大学
技术研发日:2020.08.12
技术公布日:2022/3/3
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。