技术特征:
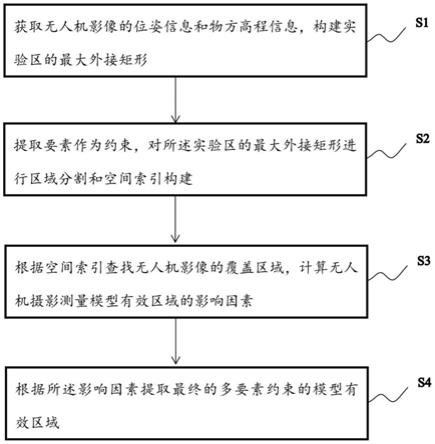
1.一种无人机摄影测量的模型有效区域自动提取方法,其特征在于,包括:获取无人机影像的位姿信息和物方高程信息,构建实验区的最大外接矩形;提取要素作为约束,对所述实验区的最大外接矩形进行区域分割和空间索引构建;根据空间索引查找无人机影像的覆盖区域,计算无人机摄影测量模型有效区域的影响因素;根据所述影响因素提取最终的多要素约束的模型有效区域。2.如权利要求1所述的无人机摄影测量的模型有效区域自动提取方法,其特征在于,所述构建实验区的最大外接矩形的方法为:获取已知的空中三角测量连接点信息,并输入无人机影像的位姿信息;设置连接点p={p1,p2,
…
,p
n
},查找连接点p
i
={x
i
,y
i
,z
i
}的位置信息;根据连接点在x、y轴上的最大值x
max
、y
max
和最小值x
min
、y
min
,构建实验区的最大外接矩形r
mbr
。3.如权利要求2所述的无人机摄影测量的模型有效区域自动提取方法,其特征在于,所述位姿信息包括由空中三角测量连接点信息得到的影像位姿、飞行控制数据中的位置和姿态信息。4.如权利要求1所述的无人机摄影测量的模型有效区域自动提取方法,其特征在于,所述构建实验区的最大外接矩形的方法还包括:使用影像地面投影多边形构建最大外接矩形r
mbr
。5.如权利要求1-4任一所述的无人机摄影测量的模型有效区域自动提取方法,其特征在于,对所述实验区的最大外接矩形进行区域分割时,包括:对实验区的物方高程信息进行聚类分析,聚类个数k;定义实验区的高度h={h1,h2,
…
,h
k
},h
k
为每一类别的高程平均值;定义实验区的初始地面高度z
g
=h1,根据影像传感器尺寸和焦距f,以及根据相似三角形原求出影像集i={i1,i2,
…
,i
m
}在垂直条件下的投影四边形面积,并求出影像垂直投影面积的平均值s;定义最小分割面积或根据实验区特性设定最小分割面积s
min
;利用最小分割面积s
min
和最少连接点n
min
要素作为约束对实验区最大外接矩形r
mbr
进行区域分割和空间索引构建。6.如权利要求5所述的无人机摄影测量的模型有效区域自动提取方法,其特征在于,当分割节点的矩形面积或连接点数量小于阈值时,则停止对所述节点的分割,将满足约束的所述节点设为空间索引的叶子节点,分割后实验区最大外接矩形r
mbr
={r1,r2,
…
,r
n
}。7.如权利要求6所述的无人机摄影测量的模型有效区域自动提取方法,其特征在于,计算无人机摄影测量模型有效区域的影响因素的方法为:根据所述空间索引查找无人机影像投影四边形的覆盖区域;计算覆盖区域叶子节点矩形和投影四边形的相交面积与矩形面积之比,并设为该节点重叠度;依次计算每张影像的重叠度覆盖,并统计每个叶子节点的影响因素。8.如权利要求7所述的无人机摄影测量的模型有效区域自动提取方法,其特征在于,所
述影响因素包括矩形重叠度之和o
i
、叶子节点矩形面积a
i
以及连接点数量t
i
在内的影响因素,所述无人机影像投影四边形的构建方法为:根据影像i
i
的位姿信息和初始高度h1,利用共线方程求出影像角点的物方空间投影,利用四个角点构建影像的物方投影四边形q
i
。9.如权利要求8所述的无人机摄影测量的模型有效区域自动提取方法,其特征在于,所述提取最终的多要素约束的模型有效区域的方法包括:根据每个叶子节点的影响因素对模型有效区域的影响,构造重要性函数w
i
;根据构造的所述重要性函数w
i
提取有效矩形,求得有效矩形的并集u;对多边形u进行区域拟合,提取最终的模型有效区域。10.一种无人机摄影测量的模型有效区域自动提取系统,其特征在于,所述无人机摄影测量的模型有效区域自动提取系统采用权利要求1-9中任意一项所述无人机摄影测量的模型有效区域自动提取方法进行无人机摄影测量的模型有效区域提取,优化三维重建过程的模型区域;所述无人机摄影测量的模型有效区域自动提取系统包括:最大外接矩形构建模块,用于获取无人机影像的位姿信息和物方高程信息,构建实验区的最大外接矩形;矩形分割模块,用于多约束的对实验区最大外接矩形进行区域分割和空间索引构建;影响因素计算模块,用于根据空间索引查找无人机影像的覆盖区域,计算无人机摄影测量模型有效区域的影响因素;以及有效区域提取模块,用于根据所述影响因素提取最终的多要素约束的模型有效区域。
技术总结
本发明涉及无人机技术领域,具体涉及一种无人机摄影测量的模型有效区域自动提取方法和系统。该方法包括:获取无人机影像的位姿信息和物方高程信息,构建实验区的最大外接矩形;提取要素作为约束,对所述实验区的最大外接矩形进行区域分割和空间索引构建;根据空间索引查找无人机影像的覆盖区域,计算无人机摄影测量模型有效区域的影响因素;根据所述影响因素提取最终的多要素约束的模型有效区域。本发明通过分析与计算无人机摄影测量模型有效区域的影响因素,从而构建多要素约束的有效区域提取模型,自动进行无人机摄影测量的模型有效区域提取,优化三维重建过程的模型区域,改变以往生成模型后再人工裁剪模型有效区域的策略,提升重建效率。提升重建效率。提升重建效率。
技术研发人员:侯泽鹏 赵峻弘 徐徐升
受保护的技术使用者:武汉大势智慧科技有限公司
技术研发日:2021.11.17
技术公布日:2022/2/18
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。