技术特征:
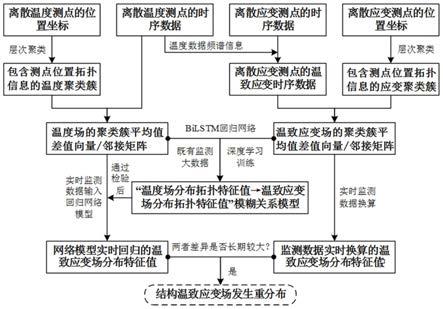
1.基于结构离散测点拓扑的温致应变场重分布智能感知方法,其特征在于,具体包括如下步骤:步骤1,针对待测结构,提取一定时间内该结构的离散的各温度测点温度时序数据和各应变测点温致应变时序数据,并进行预处理,将预处理后的各温度测点温度时序数据和温致应变时序数据存储为在每个时刻一一对应的多个数据集;步骤2,基于凝聚式层次聚类方法分别对温度测点位置坐标和应变测点位置坐标进行聚类,得到包含测点位置拓扑信息的聚类簇,计算每个时刻温度和温致应变数据在各自聚类簇内的平均值;步骤3,分别利用各时刻温度和温致应变的聚类簇的平均值,得到温度场和温致应变场的分布拓扑特征值数据;步骤4,将所有时刻一一对应的温度场和温致应变场分布拓扑特征值数据按照固定比例划分为训练集与检验集,并归一化处理;步骤5,构建双向长短期记忆回归网络模型,并设定网络参数以及训练参数,以温度场分布拓扑特征值数据为输入、温致应变场分布拓扑特征值数据为输出,利用训练集对回归网络模型进行训练;当训练达到设定值时,利用检验集对回归网络模型验证有效性;当回归网络模型输出结果与检验集温致应变场分布拓扑特征值数据之间的差异定义检验指标符合要求时,训练完成,获取训练完成的回归网络模型;否则,调整网络参数以及训练参数,重新进行训练;步骤6,在结构监测过程中,对待测结构连续获取预设时间内实时监测的离散的各温度测点温度时序数据和应变测点温致应变时序数据,并利用步骤1-步骤3所述方法计算各时刻温度场和温致应变场的分布拓扑特征值;将各时刻温度场的分布拓扑特征值作为训练完成的回归网络模型的输入,得到对应时刻回归网络模型输出结果;计算并判断相同时刻的回归网络模型输出结果与监测的温致应变场分布拓扑特征值的差异定义检验指标是否符合要求,当预设时间内不符合要求的差异定义检验指标大于预设比例时,表示该结构的温致应变模式发生重分布;否则表示该结构的温致应变模式未发生重分布。2.根据权利要求1所述的基于结构离散测点拓扑的温致应变场重分布智能感知方法,其特征在于,所述步骤1的方法具体如下:步骤1.1,对待测结构提取一定时间内离散的各温度测点温度时序数据;步骤1.2,对待测结构提取一定时间内离散的各应变测点时序数据,对结构应变测点一定范围内的温度测点温度时序数据进行频谱分析,得到温度时序数据功率谱的高功率密度值对应的频带[0,f
t
],对各应变测点数据进行处理,包括小波变换、低通滤波,得到频率小于f
t
的应变信号,并以此作为各应变测点的温致应变时序数据;步骤1.3,调节温度测点温度时序数据和温致应变时序数据的采样频率至两者中的较小值或比较小值更低的随机值,并将各测点温度、温致应变时序数据存储为在每个时刻一一对应的多个数据集。3.根据权利要求1所述的基于结构离散测点拓扑的温致应变场重分布智能感知方法,其特征在于,所述步骤2中,基于凝聚式层次聚类方法对温度测点位置坐标进行聚类,得到包含测点位置拓扑信息的聚类簇,方法如下:步骤2.1,将每一个温度测点位置坐标作为一个聚类,将测点的欧拉距离作为每两个聚
类之间的距离,计算每两个聚类之间的距离,将距离最近的两个聚类合并为新的聚类簇;步骤2.2,将聚类簇内全部数据点坐标的增量平方和作为聚类簇之间的距离,计算每两个聚类簇之间的距离,将距离最近的两个聚类簇进行合并,得到新的聚类簇;步骤2.3,重复步骤2.2直到达到预设聚类数;步骤2.4,判断聚类过程中各聚类簇内全部数据点坐标的增量平方和是否大于预设距离,输出增量平方和大于预设距离且与预设距离的差值绝对值最小的聚类簇结果。4.根据权利要求3所述的基于结构离散测点拓扑的温致应变场重分布智能感知方法,其特征在于,步骤2.1所述欧拉距离的计算公式如下:式中,d
pq
为坐标点p和q的欧拉距离,c
p
和c
q
分别为坐标点p和q的一维或多维坐标向量,j表示第j个坐标向量维度,f为坐标向量的总维度,c
p,j
和c
p,j
分别为向量c
p
和c
q
的第j个坐标向量维度的值。5.根据权利要求3所述的基于结构离散测点拓扑的温致应变场重分布智能感知方法,其特征在于,步骤2.2所述聚类簇内全部数据点坐标的增量平方和的计算公式如下:式中,d(r,s)为聚类簇r和聚类簇s的增量平方和,n
r
和n
s
分别为聚类簇r和聚类簇s内的坐标点数量,||
·
||2表示欧拉距离,和分别为聚类簇r和聚类簇s的质心坐标;各聚类簇的质心坐标的计算公式如下:式中,c
ri
为聚类簇r内的第i个坐标点的坐标向量。6.根据权利要求1所述的基于结构离散测点拓扑的温致应变场重分布智能感知方法,其特征在于,所述步骤2中,基于凝聚式层次聚类方法对应变测点位置坐标进行聚类的方法与基于凝聚式层次聚类方法对温度测点位置坐标进行聚类的方法一致。7.根据权利要求1所述的基于结构离散测点拓扑的温致应变场重分布智能感知方法,其特征在于,步骤3所述温度场的分布拓扑特征值为温度的各聚类簇的平均值在各个时刻的两两差值向量,所述温致应变场的分布拓扑特征值为温致应变的各聚类簇的平均值在各个时刻的两两差值向量;所述两两差值向量表示如下:[d
1,2
,d
1,3
,
…
,d
1,m
,
……
,d
u,v
,
……
,d
m-1,m
]式中,d
u,v
为第u个聚类簇的平均值减去第v个聚类簇的平均值的差值,u∈[1,m],v∈[1,m]且u≠v。8.根据权利要求1所述的基于结构离散测点拓扑的温致应变场重分布智能感知方法,其特征在于,步骤3所述温度场的分布拓扑特征值为温度各聚类簇的平均值在各个时刻的差值邻接矩阵,所述温致应变场的分布拓扑特征值为温致应变各聚类簇的平均值在各个时刻的差值邻接矩阵,所述差值邻接矩阵表示如下:
式中,d
m,1
为第m个聚类簇平均值减去第1个聚类簇平均值的差值,d
1,m
为第1个聚类簇中测试数据的平均值减去第m个聚类簇中测试数据的平均值的差值,d
u,v
为第u个聚类簇的平均值减去第v个聚类簇的平均值的差值,u∈[1,m],v∈[1,m]且u≠v。9.根据权利要求1所述的一种基于结构离散测点拓扑的温致应变场重分布智能感知方法,其特征在于,所述差异定义检验指标的计算公式如下:式中,t
r
为差异定义检验指标,r为单条数据中的元素个数,k为单条数据中的第k个元素,re
k
为回归模型输出结果,te
k
为温致应变场分布拓扑特征值数据,a
t
为所有te
k
中元素数值变化的最大幅度。
技术总结
本发明公开了一种基于结构离散测点拓扑的温致应变场重分布智能感知方法,包括:提取各离散测点在各时刻温度、温致应变时序数据,对温度、应变测点坐标进行凝聚式层次聚类,计算各时刻温度、温致应变数据在各自聚类簇内的平均值,计算分布拓扑特征值,构建双向长短期记忆回归网络并建立从温度场分布拓扑特征值到温致应变场分布拓扑特征值的大数据模糊关系模型,模型通过检验后,以实时温度监测数据换算温度场分布拓扑特征值输入回归网络模型,对比模型回归结果与实时应变监测数据换算的温致应变场分布拓扑特征值,并以两者的差异感知结构温致应变重分布。本发明方法实现基于离散、通用的温度与应变传感器数据智能感知结构温致应变场的重分布。温致应变场的重分布。温致应变场的重分布。
技术研发人员:赵瀚玮 丁幼亮 李爱群
受保护的技术使用者:东南大学
技术研发日:2021.11.10
技术公布日:2022/1/25
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。