技术特征:
1.量子差分进化算法优化支持向量机的滚动轴承故障诊断方法,其特征是:将由振动传感器采集到的待故障诊断的滚动轴承的输入特征矩阵p输入到故障诊断模型中,得到一维列向量q;故障诊断模型的构建过程为:将振动传感器采集的数据作为训练集对初始状态的支持向量机模型进行训练,通过不断的迭代寻找到精度最高的惩罚因子c和核函数参数γ的取值,得到所述故障诊断模型;所述迭代的过程中,采用量子差分进化算法对支持向量机模型的惩罚因子c和核函数参数γ进行优化;所述量子差分进化算法是将差分进化算法与量子理论结合得到,具体为:首先,以量子比特的编码方式取代差分进化算法中的实数编码方式,每一个实数值使用m个量子比特来表示;然后,采用改进的量子旋转门来更新量子比特中的量子角度取代差分进化算法中的变异和交叉策略;改进的量子旋转门更新后的量子角度与改进的量子旋转门的数学公式为:其中,θ
*
代表改进的量子旋转门更新后的量子角度,θ代表改进的量子旋转门更新前的量子角度,δ代表改进的量子旋转门旋转的角度,rand(0,1)为随机生成的0到1范围内的随机数,g代表量子差分进化算法的最大迭代次数,g代表当前迭代次数。2.根据权利要求1所述的量子差分进化算法优化支持向量机的滚动轴承故障诊断方法,其特征在于,故障诊断模型的构建的具体步骤为:(1)使用振动传感器采集滚动轴承内圈故障数据、滚动轴承滚动体故障数据、滚动轴承外圈6点钟方向故障数据、滚动轴承外圈3点钟方向故障数据、滚动轴承外圈12点钟方向故障数据和滚动轴承正常状态运行数据;并划分训练集和测试集;(2)构建量子差分进化算法优化支持向量机模型的初始状态的故障诊断模型;(3)以训练集的数据对初始状态的故障诊断模型进行训练,以最大迭代次数g为终止条件进行迭代,通过不断的优化,寻找到精度最高的惩罚因子c和核函数参数γ的取值,得到所述故障诊断模型,记为:其中,q为故障诊断模型的输出,p
train
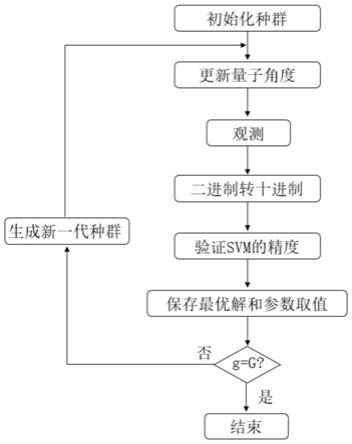
为滚动轴承故障诊断模型的训练特征矩阵,p为待故障诊断的滚动轴承的输入特征矩阵,q
train
为滚动轴承故障诊断模型的训练一维列向量;z
g
为量子差分进化算法迭代g次之后得到的对于支持向量机模型来说最优的个体向量;
其中,w1为采集的滚动轴承内圈故障数据,w2为采集的滚动轴承滚动体故障数据,w3为采集的滚动轴承外圈6点钟方向故障数据,w4为采集的滚动轴承外圈3点钟方向故障数据,w5为采集的滚动轴承外圈12点钟方向故障数据,w6为采集的滚动轴承正常状态运行数据;其中,s1为w1的标签向量,s2为w2的标签向量、s3为w3的标签向量、s4为w4的标签向量、s5为w5的标签向量、s6为w6的标签向量;s1、s2、s3、s4、s5、s6为:其中,1为滚动轴承出现内圈故障的标签,2为滚动轴承出现滚动体故障的标签,3为滚动轴承出现外圈6点钟方向故障的标签,4为滚动轴承出现外圈3点钟方向故障的标签,5为滚动轴承出现外圈12点钟方向故障的标签,6为滚动轴承正常运行的标签。3.根据权利要求2所述的量子差分进化算法优化支持向量机的滚动轴承故障诊断方法,其特征在于,所述量子差分进化算法包括使用量子比特对种群进行编码、使用改进的量子旋转门更新量子角度以及对量子比特进行观测。4.根据权利要求3所述的量子差分进化算法优化支持向量机的滚动轴承故障诊断方法,其特征在于,步骤(3)中,50≤g≤100。5.根据权利要求4所述的量子差分进化算法优化支持向量机的滚动轴承故障诊断方法,其特征在于,步骤(3)中,所述优化的具体步骤为:(a)生成初始种群;支持向量机模型的惩罚因子c和核函数参数γ作为种群内的个体向量,且使用m个量子比特来表示c与γ的值;(b)使用量子比特对初始种群进行编码,编码方式为:
sin2θ
1,i,c
cos2θ
1,i,c
=1;sin2θ
m,i,c
cos2θ
m,i,c
=1;sin2θ
1,i,γ
cos2θ
1,i,γ
=1;sin2θ
m,i,γ
cos2θ
m,i,γ
=1;其中,z
i,g
为量子差分进化算法在第g代种群中的第i个个体向量;g代表当前迭代次数,g∈(1,g);i∈(1,n),n代表种群内个体向量的数目;c
i,g
为第g代种群中第i个个体向量中惩罚因子的值;γ
i,g
为第g代种群中第i个个体向量中核函数参数的值;sinθ
1,i,c
为第i个个体向量中惩罚因子c的第1个量子比特|0>上的概率幅值,cosθ
1,i,c
为第i个个体向量中惩罚因子c的第1个量子比特|1>上的概率幅值;sinθ
m,i,c
为第i个个体向量中惩罚因子c的第m个量子比特|0>上的概率幅值,cosθ
m,i,c
第i个个体向量中惩罚因子c的第m个量子比特|1>上的概率幅值;sinθ
1,i,γ
为第i个个体向量中核函数参数γ的第1个量子比特|0>上的概率幅值,cosθ
1,i,γ
为第i个个体向量中核函数参数γ的第1个量子比特|1>上的概率幅值;sinθ
m,i,γ
为第i个个体向量中核函数参数γ的第m个量子比特|0>上的概率幅值,cosθ
m,i,γ
为第i个个体向量中核函数参数γ的第m个量子比特|1>上的概率幅值;(c)使用改进的量子旋转门更新量子角度;(d)每一次迭代之后都对每个量子比特进行观测;所述对每个量子比特进行观测是指:若sin2θ>rand(0,1),则此量子比特坍塌为经典比特1;若sin2θ≤rand(0,1),则此量子比特坍塌为经典比特0;其中,sinθ代表量子比特|0>上的概率幅值;(e)将观测得到的经典二进制比特转化为十进制数并映射至一定的区间范围内,从而得到n组c和γ的取值。6.根据权利要求5所述的量子差分进化算法优化支持向量机的滚动轴承故障诊断方法,其特征在于,步骤(e)中所述映射的公式如下:其中,代表映射之后的十进制数;代表映射之前的十进制数。7.根据权利要求5所述的量子差分进化算法优化支持向量机的滚动轴承故障诊断方法,其特征在于,所述精度最高的惩罚因子c和核函数参数γ的取值在进化迭代次数达到g次时,以测试集的数据从最后一代种群中的n组c和γ的取值中选出对支持向量机而言精度最高的个体向量,即为c和γ的最优值,记为:其中,c为支持向量机中的惩罚因子,γ为支持向量机中的核函数参数,g为量子差分进化算法的最大迭代次数,c
g,best
、γ
g,best
分别为量子差分进化算法迭代g次之后,从第g代种群中选出的对于支持向量机来说精度最高的参数。8.根据权利要求5所述的量子差分进化算法优化支持向量机的滚动轴承故障诊断方法,其特征在于,m=8。
9.根据权利要求5所述的量子差分进化算法优化支持向量机的滚动轴承故障诊断方法,其特征在于,n=30。10.根据权利要求1所述的量子差分进化算法优化支持向量机的滚动轴承故障诊断方法,其特征在于,θ∈(0,π/2),δ=0.01π。
技术总结
本发明涉及一种量子差分进化算法优化支持向量机的滚动轴承故障诊断方法,将待故障诊断的滚动轴承的输入特征矩阵P输入到所述故障诊断模型中,得到一维列向量Q,Q中出现1代表内圈故障,出现2代表滚动体故障,出现3代表外圈6点钟方向故障,出现4代表外圈3点钟方向故障,出现5代表外圈12点钟方向故障,出现6代表正常。本发明使用量子差分进化算法优化支持向量机模型,从而实现参数的自适应调整。相比传统的差分进化算法,量子的差分进化算法在优化支持向量机模型时,可以减少需要花费的时间,提高优化的精度,使得模型拥有更可靠的故障诊断性能。性能。性能。
技术研发人员:李媛媛 孙祺淳 方志军 徐华 曹乐 李小刚
受保护的技术使用者:上海工程技术大学
技术研发日:2021.08.12
技术公布日:2021/12/17
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。