技术特征:
1.一种基于pso
‑
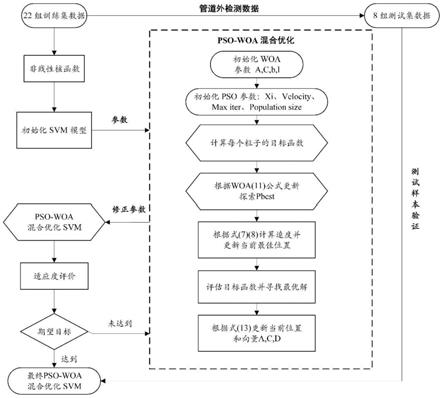
woa混合优化的svm稠油管道腐蚀速率预测方法,其特征在于,包括下述步骤:步骤s1、选择稠油管道运行过程中对腐蚀行为具有代表性、相关性的环境因素作为输入变量;步骤s2、以稠油管道为研究对象,通过现场对管道沿线的相关参数进行检测,整理检测数据作为模型数据集;步骤s3、选择22组样本数据作为训练样本,建立稠油管道腐蚀速率预测模型,将8组样本数据作为测试样本,对优化后的模型精度进行评价;步骤s4、建立基于pso
‑
woa混合优化的svm稠油管道腐蚀速率预测模型;步骤s5、根据相关评价指标对模型预测效果进行评价。2.根据权利要求1所述的基于pso
‑
woa混合优化的svm稠油管道腐蚀速率预测方法,其特征在于,所述步骤s1中稠油管道腐蚀行为具有代表性、相关性的环境因素包括管道沿线的土壤电阻率、含水率、cl
‑
含量、电位梯度、氧化还原电位、ph值。3.根据权利要求1所述的基于pso
‑
woa混合优化的svm稠油管道腐蚀速率预测方法,其特征在于,所述步骤s4中,使用svm作为稠油管道腐蚀速率预测的基础神经网络模型,具体实现步骤如下:(1)svm的基本原理是通过非线性映射函数将输入样本x映射到高维特征空间f上,线性回归函数是根据结构风险最小化的原理创建,将训练样本中的每一组数据都转化到高维空间中,在高维空间中对数据进行线性回归,从而将原样本的非线性拟合问题转化为高维空间中样本的线性回归问题,求得的拟合函数为:y
′
=f(x)=w
·
φ(x) b
ꢀꢀꢀꢀꢀ
(1)其中x为样本的输入向量,w是权重向量,w∈r,b是样本的偏差向量,b∈r,y'是预测值;当通过svm解决回归拟合问题时,会考虑并允许拟合误差,在支持向量机的基础上,引入线性不敏感损失函数(ε),得到回归支持向量机,因此,将回归问题转换为最小化结构风险的目标函数的解,即最小化目标函数的w和b的值,其中c>0,这是一个惩罚因子,它控制每个样本的惩罚度,使其超出误差ε,为了减小训练过程中产生的误差,引入松弛因子ζi和ζi',分别为的条件下样本训练误差的上限和下限,表示样本偏离离群点或者偏离分界线的一个程度,ε指线性不敏感损失函数的参数,当预测值和测量值的绝对误差小于ε时,绝对误差将被忽略;否则,它将包含在误差中;(2)在求解方程式时引入拉格朗日乘子a
i
和b
i
来构造拉格朗日函数,将问题的函数表达视作凸二次规划问题,这样可以分别对参数求偏导求解,对偶是把初始式
转化为一方面是它们近似,二是这样可以先求解w、b,对于λ,当且仅当数据落在两条虚线上时,λ才有值;对于其他的样本,λ不起作用,即λ只在支持向量上有作用,问题求解简单化;因此将其转化为对偶问题之后,凸优化被简化为二次形式的最大化,并且可以求解拉格朗日方程的鞍点;确定每个变量的偏导数并将其设置为零;在引入拉格朗日算子并使用对偶原理后转换为:(3)当借助于svm解决非线性问题时,输入样本x通过非线性映射函数被映射到高维特征空间f上,然后,执行高维特征空间的线性回归,从低维空间到高维空间的转换是通过核函数来实现的,此函数无法在高维空间中替换点积,避免使用非线性映射函数的解,并大大减少了计算时间和复杂度;采用径向基(radialbasis)函数,如下所示:其中,g是核函数的宽度,即核参数(g>0),x
i
‑
x
j
是欧几里得范数,引入核参数后,优化目标化转化为:求解出svm非线性回归模型函数为:x1,x2,
…
,x
n
是输入变量,a
i
‑
b
i
是网络权重,而每个输出向量是中间节点支持向量的关于f(x)线性变换。4.根据权利要求1所述的基于pso
‑
woa混合优化的svm稠油管道腐蚀速率预测方法,其特征在于,所述步骤s4中,使用pso
‑
woa混合优化方法对svm模型的参数进行优化,具体实现步骤如下:(1)通过pso算法优化惩罚因子c和核参数g的步骤如下:初始化:对粒子的速度和位置随机赋值,并对学习因子c1和c2进行赋值,得到svm的罚因子c和核参数g;适应度评估:对所有粒子的适应度函数值进行求算,并对局部最优值和全局最优值进行初始化操作;更新过程:对粒子的速度和位置进行更新,获得新的种群,对适应度值与其本身的历史
最佳值两者进行对比,并对种群参数c和g的全局最优值进行更新,粒子速度(v)及其当前位置(cb)根据式(7)和(8)进行更新,v
t 1
=wv
t
c1r1(pbest
t
‑
cb
t
) c2r2(gbest
t
‑
cb
t
)
ꢀꢀꢀꢀ
(7)cb
t 1
=cb
t
v
t
ꢀꢀꢀꢀꢀꢀ
(8)其中,t表示迭代次数,r1和r2是[0,1]中的两个随机变量,c1和c2是学习系数,pbest是粒子最佳位置,而gbest是粒子群最佳位置;(2)woa优化算法的具体步骤如下:给定一个随机数p∈(0,1),如果p<0.5并且|a|<1,随机寻找猎物,人工鲸鱼算法利用它种群中的随机个体位置进行食物的寻找,并且使用以下公式更新它们的空间位置:x
t 1
=x
rand
‑
a
·
d
ꢀꢀꢀ
(9)t表示已经迭代的次数,个体位置用x表示,更新位置之前随机选择个体x
rand
的总体长度用d=|c
·
x
rand
‑
x
t
|表示,参数a在[
‑
2,2]间随机生成,此外,随机个体x
rand
对目前个体x的距离的影响使用c为[0,2]随机数表示;如果p<0.5且|a|>1,继续环绕猎物,人工鲸鱼搜寻到食物后,用下面的方程式对空间位置进行更新:x
t 1
=x
best
‑
a
·
|c
·
x
best
‑
x
t
|
ꢀꢀꢀꢀꢀ
(10)这其中食物的位置即对应为x
best
种群中全局最优个体的位置;如果p≥0.5,进行螺旋捕食;人工鲸鱼与对数螺旋线的运动轨迹的特点一致,游到最佳个体x
best
,它也并且其空间位置更新:x
t 1
=d
best
·
e
bl
·
cos2πl x
t
ꢀꢀꢀꢀꢀ
(11)迭代更新后用x
t 1
表示鲸鱼的位置,位置更新前单个x的x
best
的长度用d=|x
best
‑
x
t
|计算,螺旋轨迹成形的常数用b表示,在[
‑
1,1]间随机对l赋值;将优化的模型参数代入svm模型,计算适应值,woa在结合svm进行回归预测时目标函数的适应度计算公式为:其中m为样本的数量,y
i
、y
i’为真实值与模型预测值,将woa寻优目标设为svm模型的c、g参数,将得到的最优解作为svm模型参数;(3)将woa在探索阶段、开发阶段的pso的有机融合作为目标的新解决方案;初始种群由pso启动和更新,然后通过woa再次更新获得的解决方案,v
t 1
=wv
t
c1r1(whalebest
t
‑
cb
t
) c2r2(gbest
t
‑
cb
t
)
ꢀꢀꢀꢀꢀꢀ
(13)如公式(13)所示,将woa寻优结果融合到pso数学模型公式(7),粒子群位置根据新的方程式进行更新,将负责求解复杂非线性问题最优解的粒子最优位置替换为whale位置,更新相关的决策变量,高效地将解导向最优解,woa使粒子更快地到达最优值,减少了计算时间,最后,如果达到了确定的迭代次数,则结束开发的pso
‑
woa寻优过程。
技术总结
本发明涉及一种基于PSO
技术研发人员:谢飞 苏禹铭 王丹 孙东旭
受保护的技术使用者:沈阳工业大学
技术研发日:2021.09.26
技术公布日:2021/12/17
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。