技术特征:
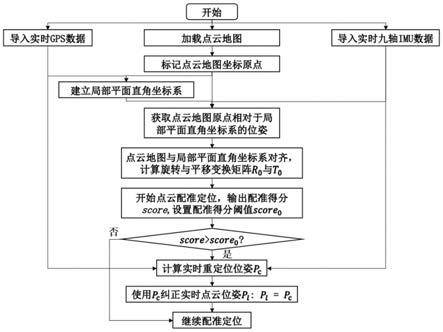
1.一种基于多传感器融合的机器人重定位方法,其特征是通过激光雷达加载点云地图,标记地图坐标原点,通过单天线gps以地图坐标原点处经纬度坐标为原点,遵循wgs84坐标系统准则,建立局部平面直角坐标系,获取点云地图原点相对于局部平面直角坐标系的位姿,其中单天线gps提供三轴位置信息,九轴imu提供方向信息,通过点云地图进行点云配准,对于点云配准定位失败的情况,通过单天线gps实时导入gps经纬度信息,将经纬度信息映射至局部平面直角坐标系获得相应点并将所述相应点投影至点云地图获取实时姿态信息,通过九轴imu获取实时方向角信息,利用实时姿态信息和实时方向角信息构成实时重定位位姿,利用实时重定位位姿pc纠正实时点云位姿,重新定位。2.根据权利要求1所述的一种基于多传感器融合的机器人重定位方法,其特征是所述将所述的相应点投影至点云地图,包括:通过点云地图与局部平面直角坐标系对齐,获得局部平面直角坐标系上的点投影至点云地图坐标系的旋转变换矩阵r0与平移变换矩阵t0,利用公式:获得所述的相应点投影至点云地图的点,其中p
gps
代表所述的相应点,p’gps
表示所述的相应点投影至点云地图的点。3.根据权利要求1或2所述的一种基于多传感器融合的机器人重定位方法,其特征是通过九轴imu获取实时方向角信息,包括:通过导入实时九轴imu偏航角,利用所述偏航角信息构成实时重定位位姿。4.根据权利要求1所述的一种基于多传感器融合的机器人重定位方法,其特征是判断点云配准定位是否失败,包括:通过点云地图输出配准得分score,与设置的配准得分阈值score0进行比较,当score>score0时,判定为点云配准定位失败,利用实时重定位位姿纠正实时点云位姿。5.一种基于多传感器融合的机器人重定位系统,其特征是包括分析映射模块和重定位模块,分析映射模块通过激光雷达加载点云地图,标记地图坐标原点,通过单天线gps以地图坐标原点处经纬度坐标为原点,遵循wgs84坐标系统准则,建立局部平面直角坐标系,获取点云地图原点相对于局部平面直角坐标系的位姿,其中单天线gps提供三轴位置信息,九轴imu提供方向信息,重定位模块通过点云地图进行点云配准,对于点云配准定位失败的情况,通过单天线gps实时导入gps经纬度信息,将经纬度信息映射至局部平面直角坐标系获得相应点并将所述相应点投影至点云地图获取实时姿态信息,通过九轴imu获取实时方向角信息,利用实时姿态信息和实时方向角信息构成实时重定位位姿,利用实时重定位位姿p
c
纠正实时点云位姿,重新定位。
6.根据权利要求5所述的一种基于多传感器融合的机器人重定位系统,其特征是分析映射模块将所述的相应点投影至点云地图的过程,包括:通过点云地图与局部平面直角坐标系对齐,获得局部平面直角坐标系上的点投影至点云地图坐标系的旋转变换矩阵r0与平移变换矩阵t0,利用公式:获得所述的相应点投影至点云地图的点,其中p
gps
代表所述的相应点,p’gps
表示所述的相应点投影至点云地图的点。7.根据权利要求5或6所述的一种基于多传感器融合的机器人重定位系统,其特征是重定位模块通过九轴imu获取实时方向角信息的过程,包括:通过导入实时九轴imu偏航角,利用所述偏航角构成实时重定位位姿。8.根据权利要求5所述的一种基于多传感器融合的机器人重定位系统,其特征是重定位模块判断点云配准定位是否失败的过程,包括:通过点云地图输出配准得分score,与设置的配准得分阈值score0进行比较,当score>score0时,判定为点云配准定位失败,利用实时重定位位姿纠正实时点云位姿。9.一种基于多传感器融合的机器人重定位装置,其特征是包括:至少一个存储器和至少一个处理器;所述至少一个存储器,用于存储机器可读程序;所述至少一个处理器,用于调用所述机器可读程序,执行权利要求1至4中任一项所述的一种基于多传感器融合的机器人重定位方法。
技术总结
本发明公开一种基于多传感器融合的机器人重定位方法,涉及定位技术领域,加载点云地图,标记地图坐标原点,通过单天线GPS以地图坐标原点处经纬度坐标为原点,建立局部平面直角坐标系,获取点云地图原点相对于局部平面直角坐标系的位姿,其中单天线GPS提供三轴位置信息,九轴IMU提供方向信息,通过点云地图进行点云配准,对于点云配准定位失败的情况,通过单天线GPS实时导入GPS经纬度信息,将经纬度信息映射至局部平面直角坐标系获得相应点并将所述相应点投影至点云地图获取实时姿态信息,通过九轴IMU获取实时方向角信息,利用实时姿态信息和实时方向角信息构成实时重定位位姿,利用实时重定位位姿Pc纠正实时点云位姿。用实时重定位位姿Pc纠正实时点云位姿。用实时重定位位姿Pc纠正实时点云位姿。
技术研发人员:刘欢 王建华 高明 马辰
受保护的技术使用者:山东新一代信息产业技术研究院有限公司
技术研发日:2021.09.24
技术公布日:2021/12/14
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。