1.本发明涉及建筑施工技术领域,尤其涉及一种铺砖装置。
背景技术:
2.目前,在建筑施工领域,由砂浆喷抹设备来进行砂浆喷抹,然后由铺砖设备来进行铺砖,因此需要两个机械臂的操作来分别完成砂浆喷抹和铺砖,这样很不方便,还增加了砂浆喷抹和铺砖的总成本。
技术实现要素:
3.本发明的主要目的在于提供一种铺砖装置,旨在解决砂浆喷抹和铺砖成本高的技术问题。
4.为实现上述目的,本发明提供一种铺砖装置,该铺砖装置包括:
5.机械臂,所述机械臂的执行端设置有公换组件;
6.至少两个执行机构,所述执行机构设置于所述机械臂上;
7.至少两个母换组件,每个所述执行机构上均设置有所述母换组件,所述母换组件与所述公换组件可拆卸连接,所述机械臂的执行端可通过所述公换组件和所述母换组件的连接带动所述执行机构移动。
8.可选地,所述机械臂包括:
9.底盘,所述底盘上设置有位移组件和放置位,所述位移组件用于带动所述底盘移动,所述执行机构设置于所述放置位上;
10.多个活动臂,多个所述活动臂依次连接形成所述机械臂的执行端,所述执行端的一端连接于所述底盘上,所述执行端的另一端与所述公换组件连接。
11.可选地,所述铺砖装置还包括:
12.升降机构,所述升降机构设置于所述底盘上,所述升降机构用于带动所述底盘升降。
13.可选地,至少一个所述执行机构为铺砖机构,所述铺砖装置还包括:
14.倾角传感器,所述倾角传感器设置于所述执行端上,所述倾角传感器用于检测所述底盘的倾角以及所述铺砖机构抓取的待铺设砖块的倾角;和/或
15.激光传感器,所述激光传感器设置于所述执行端上,所述激光传感器用于检测所述底盘与地面的距离以及所述铺砖机构抓取的待铺设砖块与待铺设位置的距离。
16.可选地,所述铺砖装置还包括:
17.标识器,每个所述执行机构上均设置有所述标识器;
18.控制器,所述控制器设置于所述机械臂上,在其中一个所述母换组件与所述公换组件连接时,位于与所述公换组件连接的所述执行机构上的所述标识器与所述控制器电连接。
19.可选地,所述公换组件包括锁芯、锁止件和驱动件,所述驱动件设置于所述锁芯
内,所述锁芯的周侧面设置有通孔,所述锁止件设置于所述通孔内,所述锁芯设置于所述机械臂的执行端,所述母换组件包括连接件,所述连接件上开设有插槽,所述插槽的内壁上设置有卡槽,所述连接件设置于所述执行机构上,所述锁芯可插入所述插槽内,以通过所述驱动件带动所述锁止件伸入或退出所述卡槽。
20.可选地,所述公换组件还包括:
21.推动件,所述推动件设置于所述锁芯内,所述推动件的一端设置有锥面,所述推动件的另一端与所述驱动件连接,所述驱动件可带动所述锥面移动以挤压所述锁止件伸入所述卡槽或退出所述卡槽。
22.可选地,所述铺砖装置还包括:
23.第一导电触点,所述第一导电触点设置于所述锁芯的周侧面或所述锁止件上,所述第一导电触点与所述控制器电性连接;
24.第二导电触点,所述第二导电触点对应设置于所述插槽内壁或所述卡槽内壁上,所述第一导电触点与所述第二导电触点可接触导电,所述第二导电触点与所述标识器电性连接。
25.可选地,所述铺砖装置还包括:
26.定位组件,所述定位组件设置于所述机械臂上,所述定位组件用于定位所述机械臂的运动位置。
27.可选地,至少一个所述执行机构为砂浆喷抹机构,所述铺砖装置还包括:
28.抹平件,所述抹平件设置于所述砂浆喷抹机构上。
29.本发明实施例提出的一种铺砖装置,在机械臂上设置公换组件,在每个机械臂上设置母换组件,母换组件可与公换组件可拆卸连接,因此可以通过母换组件与公换组件的连接,将任一执行机构连接在机械臂上,以通过机械臂带动执行机构执行相应的操作,相比于现有技术,当至少有一个执行机构为砂浆喷抹机构,至少有一个执行机构为铺砖机构时,可以通过砂浆喷抹机构上的母换组件与机械臂上的公换组件的连接,将砂浆喷抹机构连接在机械臂上,以通过机械臂带动砂浆喷抹机构喷抹砂浆,在需要铺砖时,可将砂浆喷抹机构上的母换组件从公换组件上拆卸下来,然后将铺砖机构上的母换组件与公换组件连接,以通过机械臂带动铺砖机构进行铺砖,因而可以通过一个机械臂分别带动砂浆喷抹机构和铺砖机构执行相应的操作,可以减少机械臂的使用数量,降低铺砖时的设备成本;另外将执行机构设置在机械臂上,可以保证执行机构与机械臂的运动状态相同,以便机械臂的执行端可以带动公换组件连接执行机构上的母换组件,避免执行机构距离机械臂过远,而导致机械臂的执行端无法伸到执行机构的母换组件位置处。
附图说明
30.为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图示出的结构获得其他的附图。
31.图1是本发明铺砖装置一实施例的结构示意图;
32.图2为图1中的部分结构示意图;
33.图3为图1中公换组件与母换组件的结构示意图;
34.图4为图3中母换组件的结构示意图;
35.图5为图3中公换组件的截面示意图;
36.图6为本发明喷头一实施例的结构示意图;
37.图7是本发明铺砖装置的控制方法一实施例涉及的硬件运行环境的装置结构示意图;
38.图8为本发明铺砖装置的控制方法一实施例的流程示意图;
39.图9为本发明铺砖装置的控制方法另一实施例的流程示意图;
40.图10为图9中步骤s60的一细化流程示意图;
41.图11为图9中步骤s60的另一细化流程示意图。
42.附图标号说明:
43.标号名称标号名称1机械臂11底盘12位移组件13活动臂14执行端2公换组件21锁芯211通孔22锁止件23驱动件24推动件241锥面3母换组件31插槽32卡槽4铺砖机构5定位柱6喷头
44.本发明目的的实现、功能特点及优点将结合实施例,参照附图做进一步说明。
具体实施方式
45.应当理解,此处所描述的具体实施例仅仅用以解释本发明,并不用于限定本发明。
46.如图7所示,图7是本发明实施例方案涉及的硬件运行环境的终端结构示意图。
47.本发明实施例终端可以是铺砖装置,也可以是用于控制铺砖装置的控制器。
48.如图7所示,该终端可以包括:处理器1001,例如cpu,网络接口1004,用户接口1003,存储器1005,通信总线1002。其中,通信总线1002用于实现这些组件之间的连接通信。用户接口1003可以包括显示屏(display)、输入单元比如键盘(keyboard),可选用户接口1003还可以包括标准的有线接口、无线接口。网络接口1004可选的可以包括标准的有线接口、无线接口(如wi
‑
fi接口)。存储器1005可以是高速ram存储器,也可以是稳定的存储器(non
‑
volatile memory),例如磁盘存储器。存储器1005可选的还可以是独立于前述处理器1001的存储装置。
49.本领域技术人员可以理解,图7中示出的终端结构并不构成对终端的限定,可以包括比图示更多或更少的部件,或者组合某些部件,或者不同的部件布置。
50.在一实施例中,如图7所示,作为一种铺砖装置的存储器1005中可以包括操作系统、网络通信模块、用户接口模块以及铺砖装置的控制程序。
51.在图7所示的终端中,网络接口1004主要用于连接后台服务器,与后台服务器进行
数据通信;用户接口1003主要用于连接客户端(用户端),与客户端进行数据通信;而处理器1001可以用于调用存储器1005中存储的铺砖装置的控制程序,并执行以下操作:
52.获取所述铺砖装置的执行信息;
53.根据所述执行信息确定目标执行机构;
54.控制所述铺砖装置的机械臂连接所述目标执行机构。
55.进一步地,处理器1001可以调用存储器1005中存储的铺砖装置的控制程序,还执行以下操作:
56.基于所述目标执行机构上的标识器获取标识信息;
57.根据所述标识信息确定所述目标执行机构与所述执行信息对应控制的执行机构是否匹配;
58.若匹配,控制所述机械臂执行所述执行信息;
59.若不匹配,输出报警提示信息,并进入待机状态。
60.进一步地,处理器1001可以调用存储器1005中存储的铺砖装置的控制程序,还执行以下操作:
61.获取所述砂浆喷抹机构内的砂浆状态;
62.判断所述砂浆状态与所述执行信息对应预设的目标砂浆状态是否匹配;
63.若不匹配,输出报警提示信息,并进入待机状态。
64.进一步地,处理器1001可以调用存储器1005中存储的铺砖装置的控制程序,还执行以下操作:
65.控制所述铺砖机构抓取待铺设砖块,并根据目标位姿参数将所述待铺设砖块移动到目标位置;
66.获取所述待铺设砖块的第一位姿参数以及已铺设砖块的第二位姿参数;
67.根据所述第一位姿参数和所述第二位姿参数修正在所述目标位置的所述待铺设砖块的位姿;
68.控制所述铺砖机构将所述待铺设砖块铺设在目标位置。
69.进一步地,处理器1001可以调用存储器1005中存储的铺砖装置的控制程序,还执行以下操作:
70.若所述第一位姿参数与所述第二位姿参数不匹配,则根据所述第一位姿参数和所述第二位姿参数的差值确定所述待铺设砖块的位姿调整值;
71.根据所述位姿调整值修正在所述目标位置的所述待铺设砖块的位姿。
72.进一步地,处理器1001可以调用存储器1005中存储的铺砖装置的控制程序,还执行以下操作:
73.获取预设初始执行信息以及所述机械臂的当前位姿参数;
74.采用所述当前位姿参数修正所述预设初始执行信息,以形成所述执行信息。
75.进一步地,处理器1001可以调用存储器1005中存储的铺砖装置的控制程序,还执行以下操作:
76.根据所述预设初始执行信息控制所述铺砖装置运动到预设位置;
77.判断所述当前位姿参数与所述预设初始执行信息中所述机械臂的目标位姿参数是否匹配;
78.若不匹配,按照所述目标位姿参数调整所述机械臂的当前位姿参数。
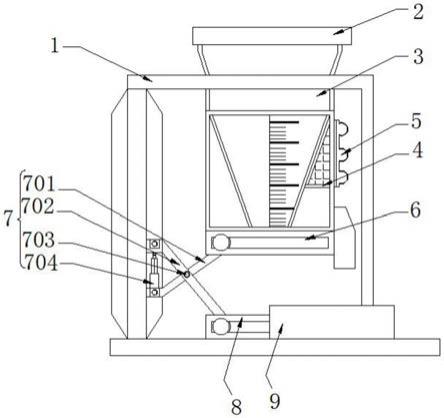
79.本发明实施例提出了一种铺砖装置,如图1及图2所示,该铺砖装置包括机械臂1、至少两个执行机构和至少两个母换组件3,机械臂1的执行端14设置有公换组件2,执行机构设置于机械臂1上,每个执行机构上均设置有母换组件3,母换组件3与公换组件2可拆卸连接,机械臂1的执行端14可通过公换组件2和母换组件3的连接带动执行机构移动。
80.由于现有技术在进行砂浆喷抹和铺砖时,均需要独立的设备来实现,即砂浆喷抹以及铺砖分别需要一个机械臂1来操作,才能实现砂浆喷抹和铺砖,导致铺砖时的设备成本较高。
81.本发明提供的铺砖装置,在机械臂1上设置公换组件2,在每个机械臂1上设置母换组件3,母换组件3可与公换组件2可拆卸连接,因此可以通过母换组件3与公换组件2的连接,将任一执行机构连接在机械臂1上,以通过机械臂1带动执行机构执行相应的操作,相比于现有技术,当至少有一个执行机构为砂浆喷抹机构,至少有一个执行机构为铺砖机构4时,可以通过砂浆喷抹机构上的母换组件3与机械臂1上的公换组件2的连接,将砂浆喷抹机构连接在机械臂1上,以通过机械臂1带动砂浆喷抹机构喷抹砂浆,在需要铺砖时,可将砂浆喷抹机构上的母换组件3从公换组件2上拆卸下来,然后将铺砖机构4上的母换组件3与公换组件2连接,以通过机械臂1带动铺砖机构4进行铺砖,因而可以通过一个机械臂1分别带动砂浆喷抹机构和铺砖机构4执行相应的操作,可以减少机械臂1的使用数量,降低铺砖时的设备成本;另外将执行机构设置在机械臂1上,可以保证执行机构与机械臂1的运动状态相同,以便机械臂1的执行端14可以带动公换组件2连接执行机构上的母换组件3,避免执行机构距离机械臂1过远,而导致机械臂1的执行端14无法伸到执行机构的母换组件3位置处。
82.在一实施例中,如图1所示,机械臂1包括底盘11和多个活动臂13,底盘11上设置有位移组件12和放置位,位移组件12用于带动底盘11移动,执行机构设置于放置位上,多个活动臂13依次连接形成机械臂1的执行端14,执行端14的一端连接于底盘11上,执行端14的另一端与公换组件2连接。在底盘11上设置位移组件12可以通过位移组件12带动底盘11移动,在铺砖过程中,可以通过位移组件12带动底盘11自动移动到待铺砖位置,以实现自动铺砖;将执行机构设置在放置位上,可以保证执行机构与底盘11的运动状态相同,保证机械臂1的执行端14可以随时与执行机构连接;多个活动臂13依次连接以形成机械臂1的执行端14,该执行端14具有多个自由度,可以在多个空间维度上运动,公换组件2又设置在执行端14的端部,可以通过执行端14带动执行机构进行铺砖操作。
83.在一实施例中,如图1所示,位移组件12为全向轮结构,还可以为舵轮结构,以通过位移组件12带动底盘11在多个方向上自由移动,本实施例对位移组件不作具体限定。
84.在一实施例中,铺砖装置还包括升降机构,升降机构设置在底盘11上,升降机构用于带动底盘11升降,方便通过升降机构将底盘11升降到一个合适的高度进行铺砖,当升降机构设置为多个时,还可以调整底盘11的倾角。
85.在本实施例中,作为一种可选实施例,还可以将位移组件12设置在升降机构的底部。
86.可以理解地,升降机构可以为市场上的滑轨升降机构,本实施例对升降机构不作具体限定。
87.在一实施例中,如图1所示,当至少有一个执行机构为铺砖机构4时,铺砖装置还包
括倾角传感器,倾角传感器设置于机械臂1的执行端14上,倾角传感器用于检测底盘11的倾角以及铺砖机构4抓取的待铺设砖块的倾角,以便检测底盘11移动到待铺设位置时,底盘11是否倾斜,以方便铺砖,在进行铺砖时,倾角传感器还可以检测待铺设砖块是否倾斜,以将铺砖机构4抓取的待铺设砖块与已铺设砖块对齐。
88.在本实施例中,倾角传感器可以设置至少两个,其中至少一个设置在底盘11上,以检测底盘11是否倾斜,至少一个设置在执行端14,以检测铺砖机构4抓取的待铺设砖块是否与已铺设砖块对齐。
89.在一实施例中,如图1所示,当至少有一个执行机构为铺砖机构4时,铺砖装置还包括激光传感器,激光传感器设置于机械臂1的执行端14上,激光传感器用于检测底盘11与地面的距离以及铺砖机构4抓取的待铺设砖块与待铺设位置的距离,以便检测底盘11距离地面的距离,从而将底盘11升降到一个合适的高度进行铺砖操作,还能检测铺砖机构4抓取的待铺设砖块到待铺设位置的距离,以将待铺设砖块铺设在待铺设位置。
90.在本实施例中,激光传感器可以设置至少两个,其中至少一个设置在底盘11上,以检测底盘11的高度,至少一个设置在执行端14上,以检测待铺设砖块到待铺设位置的距离。
91.在一实施例中,铺砖装置还包括标识器和控制器,每个执行机构上均设置有标识器,控制器设置于机械臂1上,在其中一个母换组件3与公换组件2连接时,位于与公换组件2连接的执行机构上的标识器与控制器电连接,即由于母换组件3设置在执行机构上,因此在母换组件3与公换组件2连接时,执行机构可以通过母换组件3与公换组件2连接,同时与公换组件2连接的执行机构上的标识器也与控制器电连接,以通过控制器获取该标识器内的识别码,然后利用控制器通过该识别码判断与公换组件2连接的执行机构是否正确,避免公换组件2连接的是铺砖机构4却执行砂浆喷抹操作,导致设备损坏、砖块碎裂等。
92.可以理解地,控制器与机械臂1、标识器等部件可以通过通信总线或局域网连接。
93.在本实施例中,标识器可以为阀岛,阀岛是由多个电控阀构成的控制元器件,具体地,标识器与母换组件3一一对应,即通过标识器编码母换组件3,使得每个母换组件3均具有唯一的编码,可以理解地,每个执行机构上还可以设置多个标识器,该多个标识器的识别码相同,该多个标识器可以为不同种类的标识器;控制器与倾角传感器、激光传感器、升降机构和机械臂电性连接,以通过控制器协调各部件配合实现铺砖。
94.在一实施例中,铺砖机构4包括抓取组件,抓取组件用于抓取待铺设砖块,具体地,抓取组件可以为吸盘结构,通过抽真空的方式产生内负压以吸取待铺设砖块。
95.在一实施例中,抓取组件上设置有振捣驱动件,振捣驱动件用于振动抓取组件,以在铺砖后振捣砖块,使得砖块与砂浆的接触更充分。
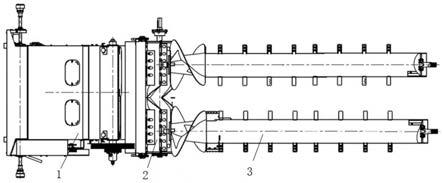
96.在一实施例中,如图6所示,至少有一个执行机构为砂浆喷抹机构,砂浆喷抹机构具有喷头6,母换组件3设置在喷头6上,以便通过机械臂带动喷头6移动。
97.可以理解地,待铺设砖块和砂浆均设置在底盘上。
98.在一实施例中,如图3至图5所示,公换组件2包括锁芯21、锁止件22和驱动件23,驱动件23设置于锁芯21内,锁芯21的周侧面设置有通孔211,锁止件22设置于通孔211内,锁芯21设置于机械臂1的执行端14,母换组件3包括连接件,连接件上开设有插槽31,插槽31的内壁上设置有卡槽32,连接件设置于执行机构上,锁芯21可插入插槽31内,以通过驱动件23带动锁止件22伸入或退出卡槽32。当需要将公换组件2与母换组件3连接时,执行端14带动公
换组件2移动,以使锁芯21插入插槽31内,然后通过驱动件23带动锁止件22自通孔211伸出到卡槽32,以将锁芯21与连接件卡接,实现公换组件2与母换组件3的连接;当需要将公换组件2与母换组件3拆卸时,驱动件23移动使得锁止件22返回通孔211进行复位,从而使得锁芯21与连接件分离,实现公换组件2与母换组件3的拆卸。
99.可以理解地,驱动件23可以通过控制器进行控制。
100.在一实施例中,如图5所示,公换组件2还包括推动件24,推动件24设置于锁芯21内,推动件24的一端设置有锥面241,推动件24的另一端与驱动件23连接,驱动件23可带动锥面241移动以挤压锁止件22伸入卡槽32或退出卡槽32,锁止件22具有返回通孔211的趋势,当驱动件23带动推动件24的锥面241推动锁止件22朝向卡槽32移动时,可以使得公换组件2与母换组件3连接,当驱动件23带动锥面241移动以与锁止件22分离时,由于锁止件22具有返回通孔211的趋势,会自动从退出卡槽32,实现公换组件2与母换组件3的分离。
101.在本实施例中,通孔211朝向锁芯21内的一侧为倾斜面,以方便锁止件22在自身重力作用下朝向锁芯21内的一侧移动,在公换组件2与母换组件3连接时,推动件24的锥面241会顶住锁止件22,以阻止锁止件22回到通孔211内,可以理解地,本实施例仅为其中一种实现方式,并不构成具体地限定。
102.在本实施例中,驱动件23可以为电机,也可以为气缸,在此不作具体限定,当驱动件23为电机时,可以通过丝杆结构实现驱动件23带动锥面242的目的。
103.在一实施例中,如图3所示,锁芯21上设置有定位柱5,连接件上设置有定位孔,当锁芯21插入插槽31时,定位柱5可插入定位孔内,以阻止公换组件2相对母换组件3转动。
104.在一实施例中,所述铺砖装置还包括第一导电触点和第二导电触点,第一导电触点设置于锁芯21的周侧面或锁止件22上,第一导电触点与控制器电性连接,第二导电触点对应设置于插槽31内壁或卡槽32内壁上,第一导电触点与第二导电触点可接触导电,第二导电触点与标识器电性连接,以当公换组件2与母换组件3连接时,可以实现控制器与标识器的通信连接,从而通过控制器分辨公换组件2与母换组件3是否连接正确,避免执行机构连接错误的情况发生。
105.在本实施例中,第一导电触点或/和第二导电触点为弹性触点,利用第一导电触点或/和第二导电触点的弹性,可以提高第一导电触点与第二导电触点电连接的稳定性。
106.在一实施例中,铺砖装置还包括定位组件,定位组件设置于机械臂1上,定位组件用于定位机械臂1的运动位置,以确定机械臂1是否运动到预设位置。
107.在本实施例中,定位组件可以为gps定位系统,也可以为北斗定位系统,还可以为激光slam定位系统,当铺砖装置位于室外时,可以使用gps定位系统或北斗定位系统进行初定位,当铺砖装置位于室内时,可以使用激光slam定位系统进行定位,以根据不同的工况选择合适的定位系统,本实施例在此不作具体限定。
108.在一实施例中,至少一个执行机构为砂浆喷抹机构,铺砖装置还包括抹平件,抹平件设置于砂浆喷抹机构上,抹平件可以在执行端14的带动下抹平已经喷抹好的砂浆,使得待铺设位置的砂浆更平整。
109.可以理解地,图1中仅示出了铺砖机构,并没有示出其他执行机构;如图6所示,执行机构可以为砂浆喷抹机构,当执行机构为砂浆喷抹机构时,砂浆喷抹机构包括储料箱和喷头6,喷头6与储料箱连通,储料箱用于储存砂浆,喷头6用于吸取砂浆并将砂浆喷出喷头6
外,储料箱可以设置在底盘11内,喷头6可以设置在底盘11上,以方便机械臂1带动公换组件2连接砂浆喷抹机构上的母换组件3;执行机构还可以为抹平机构,抹平机构用于抹平砂浆。
110.基于上述铺砖装置的硬件构架,提出本发明铺砖装置的控制方法的各个实施例,以实现铺砖操作。
111.在第一实施例中,参照图8,本实施例提出的铺砖装置的控制方法包括以下步骤:
112.步骤s10,获取铺砖装置的执行信息;
113.步骤s20,根据执行信息确定目标执行机构;
114.步骤s30,控制铺砖装置的机械臂连接目标执行机构。
115.在本实施例中,需要获取铺砖装置的执行信息,以便铺砖装置根据执行信息进行自动铺砖。执行信息对应设置有建筑物的三维图形信息、机械臂的运动轨迹、执行机构的连接次序、目标执行机构的执行动作等信息。
116.具体地,建筑物的三维图像信息可以让铺砖装置有位置参考点,从而可以进行轨迹规划,机械臂的运动轨迹可以使铺砖装置按照预设轨迹进行运动,以便铺砖装置可以自动地连续铺砖,执行机构的连接次序可以使得铺砖装置能连接不同的执行机构,以准确地执行相应的操作,例如,在砂浆喷抹时需要通过砂浆喷抹机构来执行,在铺砖时需要通过铺砖机构来执行,因此在铺砖时,执行机构与机械臂的连接次序不能发生错误,目标执行机构的执行动作可以实现对应的操作,例如,在砂浆喷抹机构与机械臂连接时,可以进行砂浆喷抹操作,在铺砖机构与机械臂连接时,可以进行铺砖操作。
117.可以理解地,执行信息还可以包括待铺设砖块的类型和数量,以便铺砖装置可以铺设不同类型的砖块,还能根据铺砖数量确定待铺设砖块的数量是否足够。
118.在本实施例中,建筑物的图形信息可以通过建筑信息模型(building information modeling,简称bim)设计得到,机械臂的运动轨迹、执行机构的连接次序和目标执行机构的执行动作通过编程得到。
119.在本实施例中,以执行机构分别为砂浆喷抹机构和铺砖机构为例,由于在铺砖过程中,砂浆喷抹和铺砖需要不同的执行机构去完成,因此需要确定机械臂应该与哪一个执行机构连接,以该执行机构作为目标执行机构,然后将机械臂与该目标执行机构连接,通过与机械臂连接的目标执行机构执行相应的砂浆喷抹或铺砖操作,实现铺砖。
120.在本实施例中,控制铺砖装置的机械臂连接目标执行机构,此处的连接可以是控制机械臂去组装目标执行机构,也可以是工作人员手动将目标执行安装在机械臂上后,机械臂再与目标执行机构卡接。
121.本发明提出的铺砖装置的控制方法,通过获取铺砖装置的执行信息,然后根据执行信息确定目标执行机构,再控制铺砖装置的机械臂连接目标执行机构,以通过一个机械臂可以与至少两个执行机构连接,可以减少机械臂的使用数量,从而降低在铺砖过程中的设备成本。
122.在第二实施例中,参照图9,基于上述第一实施例,每个执行机构上均设置有用于识别执行机构的标识器,在步骤s30之后还包括以下步骤:
123.步骤s40,基于目标执行机构上的标识器获取标识信息;
124.步骤s50,根据标识信息确定目标执行机构与执行信息对应控制的执行机构是否匹配;
125.若匹配,执行步骤s60,控制机械臂执行执行信息;
126.若不匹配,执行步骤s70,输出报警提示信息,并进入待机状态。
127.在本实施例中,在每个执行机构上设置标识器,使得标识器与执行机构对应,当机械臂与目标执行机构连接时,该目标执行机构上的标识器与控制器连接,以将标识器的标识信息发送给控制器,控制器根据标识信息确定目标执行机构与执行信息对应控制的执行机构是否匹配,若匹配,说明机械臂与目标执行机构连接正确,即机械臂与目标执行机构的连接和执行信息的控制程序一致,若不匹配,说明机械臂与目标执行机构连接错误,即机械臂与目标执行机构的连接和执行信息的控制程序不一致,因此输出报警提示信息,并进入待机状态,以提示工作人员作出相应的调试措施,以使铺砖装置可以及时进行铺砖操作。
128.在本实施例中,标识信息可以为识别码,执行信息对应设置有预设码,若识别码与预设码相同,则说明目标执行机构与执行信息对应控制的执行机构匹配,若不相同,则说明目标执行机构与执行信息对应控制的执行机构不匹配,例如,当执行机构分别为砂浆喷抹机构与铺砖机构,需要执行砂浆喷抹操作时,若此时机械臂连接的是铺砖机构,则标识码与预设码不同,无法通过铺砖机构进行砂浆喷抹操作,此时,需要输出报警提示信息,并进入待机状态,等待工作人员进行后续处理。
129.可以理解地,预设码是根据标识器的识别码设置的,例如,将识别码设置为100,若预设码也为100,此时识别码与预设码相同,说明识别码与预设码匹配,即机械臂与执行机构连接正确;将识别码设置为100,若预设码为1000,此时识别码与预设码不相同,说明识别码与预设码不匹配,即机械臂与执行机构连接错误,则输出报警提示信息。
130.在本实施例中,参照图10,当目标执行机构为砂浆喷抹机构时,步骤s60包括:
131.步骤s61,获取砂浆喷抹机构内的砂浆状态;
132.步骤s62,判断砂浆状态与执行信息对应预设的目标砂浆状态是否匹配;
133.若匹配,则喷抹砂浆;
134.若不匹配,则执行步骤s63,输出报警提示信息,并进入待机状态。
135.在本实施例中,可以在砂浆喷抹机构上设置压力传感器,通过压力传感器获取砂浆喷抹机构的喷头位置的压力参数,执行信息对应有预设的压力阈值,砂浆状态包括砂浆过稀、砂浆已凝固和砂浆过稠,压力阈值可以根据实际经验设置,若压力参数小于或等于压力阈值,说明砂浆状态与执行信息对应预设的目标砂浆状态匹配,砂浆喷抹机构可以正常喷抹砂浆,若压力参数大于压力阈值,说明砂浆状态与执行信息对应预设的目标砂浆状态不匹配,砂浆过稀,或砂浆已经凝固,此时需要输出报警提示信息,提示工作人员作出相应的处理措施。
136.参照图11,当目标执行机构为铺砖机构时,步骤s60包括:
137.步骤s64,控制铺砖机构抓取待铺设砖块,并根据目标位姿参数将待铺设砖块移动到目标位置;
138.步骤s65,获取待铺设砖块的第一位姿参数以及已铺设砖块的第二位姿参数;
139.步骤s66,根据第一位姿参数和第二位姿参数修正在目标位置的待铺设砖块的位姿;
140.步骤s67,控制铺砖机构将待铺设砖块铺设在目标位置;
141.步骤s68,控制铺砖机构振捣待铺设砖块。
142.在本实施例中,根据执行信息控制铺砖装置抓取砖块,并根据待铺设砖块的目标位姿参数将待铺设砖块移动到目标位置,通过在铺砖机构或机械臂的执行端设置视觉组件,例如ccd相机,然后利用视觉组件以拍照的方式获取待铺设砖块的第一位姿参数以及已铺设砖块的第二位姿参数,并根据获取的第一位姿参数和第二位姿参数将待铺设砖块铺设在目标位置,然后再振捣该待铺设砖块,以增加待铺设砖块与砂浆的接触面积,提高待铺设砖块固定在砂浆上的牢固程度,保证待铺设砖块与已铺设砖块对齐,可以理解地,第一位姿参数包括已铺设砖块的姿态信息和位置信息,第二位姿参数包括待铺设砖块的姿态信息和待铺设砖块相对于已铺设砖块的位置信息。
143.在本实施例中,在将待铺设砖块移动到目标位置时,还需要对在目标位置的待铺砖块的位姿进行修正,即步骤s66具体包括判断第一位姿参数与第二位姿参数是否匹配,若匹配,则执行步骤s67,控制铺砖机构将待铺设砖块铺设在目标位置,若不匹配,则根据第一位姿参数和第二位姿参数的差值确定待铺设砖块的位姿调整值,根据位姿调整值修正在目标位置的待铺设砖块的位姿。
144.在本实施例中,基于执行信息,铺砖装置可以根据第二位姿参数得到第二位姿参数的阈值,判断第一位姿参数与第二位姿参数是否匹配,即判断第一位姿参数是否小于或等于第二位姿参数的阈值,若第一位姿参数小于或等于第二位姿参数的阈值,则说明第一位姿参数与第二位姿参数匹配,待铺设砖块与已铺设砖块基本对齐,其对齐误差在可接受的范围内,若第一位姿参数大于第二位姿参数的阈值,说明第一位姿参数与第二位姿参数不匹配,待铺设砖块与已铺设砖块没有对齐,需要调整待铺设砖块的位姿,调整待铺设砖块的位姿时,将第二位姿参数与第一位姿参数作差,得到的差值即为待铺设砖块的位姿误差,并以该差值作为待铺设砖块的位姿调整值,根据位姿调整值控制铺砖机构调整在目标位置的待铺设砖块的位姿。
145.具体地,在铺砖装置铺砖时,会建立坐标系,因此待铺设砖块在坐标系内的坐标,即为待铺砖块的第一位姿参数,已铺设砖块在坐标系内的坐标即为第二位姿参数,将待铺设砖块与已铺设砖块对齐的过程,即待铺设砖块的横坐标小于或等于已铺设砖块的横坐标的阈值,使待铺设砖块的纵坐标小于或等于已铺设砖块的纵坐标的阈值,使待铺设砖块的竖坐标小于或等于已铺设砖块的竖坐标的阈值,由于第一位姿参数和第二位姿参数是通过拍照获取的,因此可以将待铺设砖块和已铺设砖块的形状用坐标表示,以便获取待铺设砖块的位姿调整值,可以理解地,该横坐标、纵坐标和竖坐标分别对应坐标系的x坐标、y坐标和z坐标,相应坐标对应的阈值即为第二位姿参数的阈值。
146.在第三实施例中,基于第一实施例的方案,在获取铺砖装置的执行信息时,可以先获取预设初始执行信息以及机械臂的当前位姿参数,然后采用当前位姿参数修正预设初始执行信息,以形成执行信息。预设初始执行信息为工作人员根据实物模型编写的执行程序,该执行程序可以从服务器下载,也可以存储在铺砖装置,机械臂的当前位姿参数包括机械臂的位置信息、方向信息、高度信息和倾角消息中的至少一种,机械臂的位置信息和方向信息通过定位组件(例如北斗定位系统)检测获取,在获取机械臂的方向信息时,通过定位组件导航机械臂的运动趋势,以确定机械臂的前后左右方向,例如,在机械臂上设置一个初始方向,导航得到该初始方向偏离机械臂的运动趋势为15
°
,即可得到机械臂的方向为初始方向偏15
°
,机械臂的高度信息可以通过激光传感器检测获取,机械臂的倾角信息可以通过倾
角传感器获取,由于机械臂在实际运行过程中,相比于预设初始执行信息中机械臂的目标位姿参数存在误差,因此可以根据当前位姿参数修正预设初始执行信息,以消除或减小当前位姿参数与目标位姿参数之间的误差,提高铺砖精度。
147.在本实施例中,在获取机械臂的当前位姿参数之前,先根据预设初始执行信息控制铺砖装置运动到预设位置,然后判断当前位姿参数与预设初始执行信息中机械臂的目标位姿参数是否匹配,若匹配,则说明当前位姿参数与预设初始执行信息中机械臂的目标位姿参数之间的误差在允许范围内,机械臂在运行过程中产生的误差较小,可以以当前位姿参数作为执行信息,若不匹配,则说明当前位姿参数与预设初始执行信息中机械臂的目标位姿参数之间的误差较大,需要对机械臂的位姿进行调整,以减小机械臂的位姿误差,提高铺砖精度。
148.可以理解地,由于实际工况下的地面可能不平整,在机械臂的运行过程中可能会倾斜,或者运行方向有些微偏差,或者机械臂的高度有偏差,因此,当机械臂运行到预设位置进行铺砖时,需要检测机械臂的当前位姿参数是否与预设初始执行信息中机械臂的目标位姿参数一致或相近,以确定是否要调整机械臂的高度、方向和倾角,在调整时,通过升降机构调整机械臂的高度和倾角,通过位移组件调整机械臂的方向。
149.在本实施例中,由于机械臂包括底盘和多个活动臂,活动臂依次连接形成的执行端设置在底盘上,执行端的自由度较多,其位姿参数获取难度较大,因此,可以获取底盘的位姿参数,以判断底盘的当前位姿参数与预设初始执行信息中底盘的目标位姿参数是否匹配,从而判断机械臂的当前位姿参数与预设初始执行信息中机械臂的目标位姿参数是否匹配。
150.在铺砖时,先铺设一块砖块以作为已铺设砖块,然后利用视觉组件拍照该已铺设砖块以获得该已铺设砖块的第二位姿参数,然后根据实际需要,在执行信息内设定一个误差范围,通过铺砖装置在第二位姿参数的基础上确定第二位姿参数的阈值,以确定一个后续铺设待铺设砖块的基准。
151.可以理解地,本发明提供的铺砖装置还可以修补已经铺设的建筑,例如,当出现停电、设备损坏、砖块铺设不牢靠等情况时,铺砖装置可以存储该待铺设位置的坐标,然后根据存储的坐标移动到该待铺设位置进行铺砖操作。
152.可以理解地,本发明提供的铺砖装置可以在地面上铺砖,也可以在墙面上铺砖,本实施例仅示出铺设一块待铺设砖块的控制方法,连续铺砖时,只需要根据需求重复执行上述实施例提供的铺砖装置的控制方法即可。
153.此外,本发明实施例还提出一种铺砖装置,铺砖装置包括存储器和处理器,存储器上存储有铺砖装置的控制程序,铺砖装置的控制程序被处理器执行时实现如上述任一实施例述及的铺砖装置的控制方法的步骤。
154.此外,本发明实施例还提出一种计算机可读存储介质,计算机可读存储介质上存储有铺砖装置的控制程序,铺砖装置的控制程序被处理器执行时实现如上述任一实施例述及的铺砖装置的控制方法的步骤。
155.需要说明的是,在本文中,术语“包括”、“包含”或者其任何其他变体意在涵盖非排他性的包含,从而使得包括一系列要素的过程、方法、物品或者系统不仅包括那些要素,而且还包括没有明确列出的其他要素,或者是还包括为这种过程、方法、物品或者系统所固有
的要素。在没有更多限制的情况下,由语句“包括一个
……”
限定的要素,并不排除在包括该要素的过程、方法、物品或者系统中还存在另外的相同要素。
156.上述本发明实施例序号仅仅为了描述,不代表实施例的优劣。
157.通过以上的实施方式的描述,本领域的技术人员可以清楚地了解到上述实施例方法可借助软件加必需的通用硬件平台的方式来实现,当然也可以通过硬件,但很多情况下前者是更佳的实施方式。基于这样的理解,本发明的技术方案本质上或者说对现有技术做出贡献的部分可以以软件产品的形式体现出来,该计算机软件产品存储在如上所述的一个存储介质(如rom/ram、磁碟、光盘)中,包括若干指令用以使得一台终端设备(可以是手机,计算机,服务器,空调器,或者网络设备等)执行本发明各个实施例所述的方法。
158.以上仅为本发明的优选实施例,并非因此限制本发明的专利范围,凡是利用本发明说明书及附图内容所作的等效结构或等效流程变换,或直接或间接运用在其他相关的技术领域,均同理包括在本发明的专利保护范围内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。