1.本技术涉及墙体检测技术领域,尤其是涉及一种墙体检测无人机。
背景技术:
2.建筑物质量检测,需要对建筑外墙进行拍照检测和空鼓检测。
3.现有的,拍照检测一般是通过无人机进行的,无人机的检测范围比较广泛,而空鼓检测这是通过蜘蛛人人工敲击墙体进行检测的。
4.发明人认为上述通过蜘蛛人人工敲击墙体检测墙体的空鼓现象,存在建筑物结构对蜘蛛人的检测造成干扰的现象,存在待改进之处。
技术实现要素:
5.为了同时对墙体的渗水和空鼓现象进行检测,减小因为建筑物的结构对墙体的空鼓检测造成的干扰,本技术提供一种墙体检测无人机。
6.本技术提供的一种墙体检测无人机,采用如下的技术方案:
7.一种墙体检测无人机,包括无人机本体和安装在所述无人机本体上的摄像器,所述无人机本体上安装有控制盒,所述摄像器与所述控制盒电连接,所述无人机本体的侧壁滑移连接有敲击头,所述无人机本体上设置有用于驱使所述敲击头敲击墙面的驱动组件,所述无人机本体上设置有用于采集所述敲击头敲墙的声音的采音装置,所述无人机本体上设置有用于在墙体上做标记的喷涂模块。
8.通过采用上述技术方案,控制盒接收无人机遥控器的指令,工作人员采用无人机的遥控器控制无人机本体的移动,摄像器采用红外摄像器,摄像器的设置拍摄墙体的外壁,摄像器与控制盒通过数据线电连接,用于采集高空墙体外壁上的情况;驱动组件驱使敲击头滑移,敲击头对墙体的外壁进行敲击,采音装置采集敲击头敲击墙体的声音,通过声音来判断墙体是否空鼓,喷涂模块的设置对墙体的空鼓区域进行标记,方便识别;通过无人机本体带动敲击头移动,驱动组件驱使敲击头滑移,对墙体的外壁进行敲击检测,从而减小因为墙体的结构对墙体空鼓的检测造成的干扰。
9.可选的,所述驱动组件包括固定在所述无人机本体上的引导轨、与所述引导轨滑移连接的驱动架和驱使所述驱动架滑移的驱动杆,所述敲击头与所述驱动架固定连接,所述驱动架的侧壁上开设有引导槽,所述驱动杆的端部固定有驱动块,所述驱动杆远离所述驱动块的一端固定有转动杆,所述转动杆与所述无人机本体的外壁转动连接,所述驱动块滑移在所述引导槽内,所述无人机本体上设置有用于驱使所述转动杆转动的驱动件。
10.通过采用上述技术方案,驱动件驱使转动杆转动,转动杆带动驱动杆转动,驱动杆带动驱动块在引导槽内滑移,带动驱动架在引导轨上滑移,从而带动敲击头移动,敲击墙体的外壁。
11.可选的,所述驱动架靠近所述敲击头的部位呈中空设置,所述驱动架的内腔内固定有阻尼器和减震弹簧,所述减震弹簧套设在所述阻尼器的活塞杆上,所述敲击头与所述
阻尼器的端部固定连接,所述阻尼器远离所述敲击头的一端与所述驱动架的内壁固定连接。
12.通过采用上述技术方案,阻尼器和减震弹簧的配合使用起到减震作用,避免敲击头与墙体外壁之间的刚性接触,减小外力对无人机本体的干扰。
13.可选的,所述摄像器包括可转动的摄像头和记录所述摄像头录像的记录装置,所述记录装置与所述摄像头电连接,所述记录装置与所述控制盒电连接。
14.通过采用上述技术方案,摄像头的设置拍摄墙体外壁上的结构,记录装置的设置记录摄像头摄取的结果。
15.可选的,所述喷涂模块包括喷涂泵、与所述喷涂泵连接的料箱,所述喷涂泵安装在所述无人机本体上,所述喷涂泵与所述控制盒电连接,所述料箱固定在所述无人机本体上。
16.通过采用上述技术方案,工作人员将染料装入料箱内,当需要对墙体进行喷涂时,工作人员通过控制盒来控制喷涂泵的开启,喷涂泵从料箱内抽取染料,喷涂泵将染料喷至墙体外壁上。
17.可选的,所述无人机本体的侧壁上固定有视觉传感器,所述视觉传感器位于靠近所述驱动架的位置。
18.通过采用上述技术方案,视觉传感器的设置对无人机至墙体外壁之间的距离进行监测,使得无人机与墙体外壁之间保持一定的距离,减小无人机撞至墙面上的可能性。
19.可选的,所述无人机本体的侧壁上固定有防撞栏,所述无人机本体的螺旋桨位于所述防撞栏内。
20.通过采用上述技术方案,防撞栏的设置对无机人本体上的螺旋桨进行保护,防止无人机本体上的螺旋桨与墙体外壁之间发生碰撞,从而减小无人机本体坠落的可能性。
21.可选的,所述敲击头呈中空设置,所述敲击头的外壁呈圆弧设置。
22.通过采用上述技术方案,减轻敲击头的重量,减小无人机本体承受的载荷,且增大了敲击头与墙体外壁之间的敲击产生较大的声音,便于声音的采集。
23.综上所述,本技术包括以下至少一种有益技术效果:
24.1.摄像器的设置拍摄墙体外壁的结构,方便工作人员对墙体进行拍照检测;驱动组件驱使敲击头滑移,敲击头敲击墙体的外壁,采音装置采集敲击头的敲击声,喷涂模块对墙体上出现问题的地方喷涂标记,从而实现对墙体空鼓的检测,工作人员只需通过无人机的遥控器控制控制盒,从而实现对墙体外壁的拍摄检测和空鼓检测,对墙体的检测更加方便。
25.2.视觉传感器的设置控制无人机本体与墙体外壁之间的距离,方便控制敲击头与墙体外壁之间的距离,且减小无人机本体与墙体外壁之间发生碰撞的可能性;防撞栏的设置对无人机本体上螺旋桨起到保护作用,减小无人机本体上的螺旋桨与墙体外壁之间发生碰撞的可能性,从而减小无人机本体坠落的可能性。
附图说明
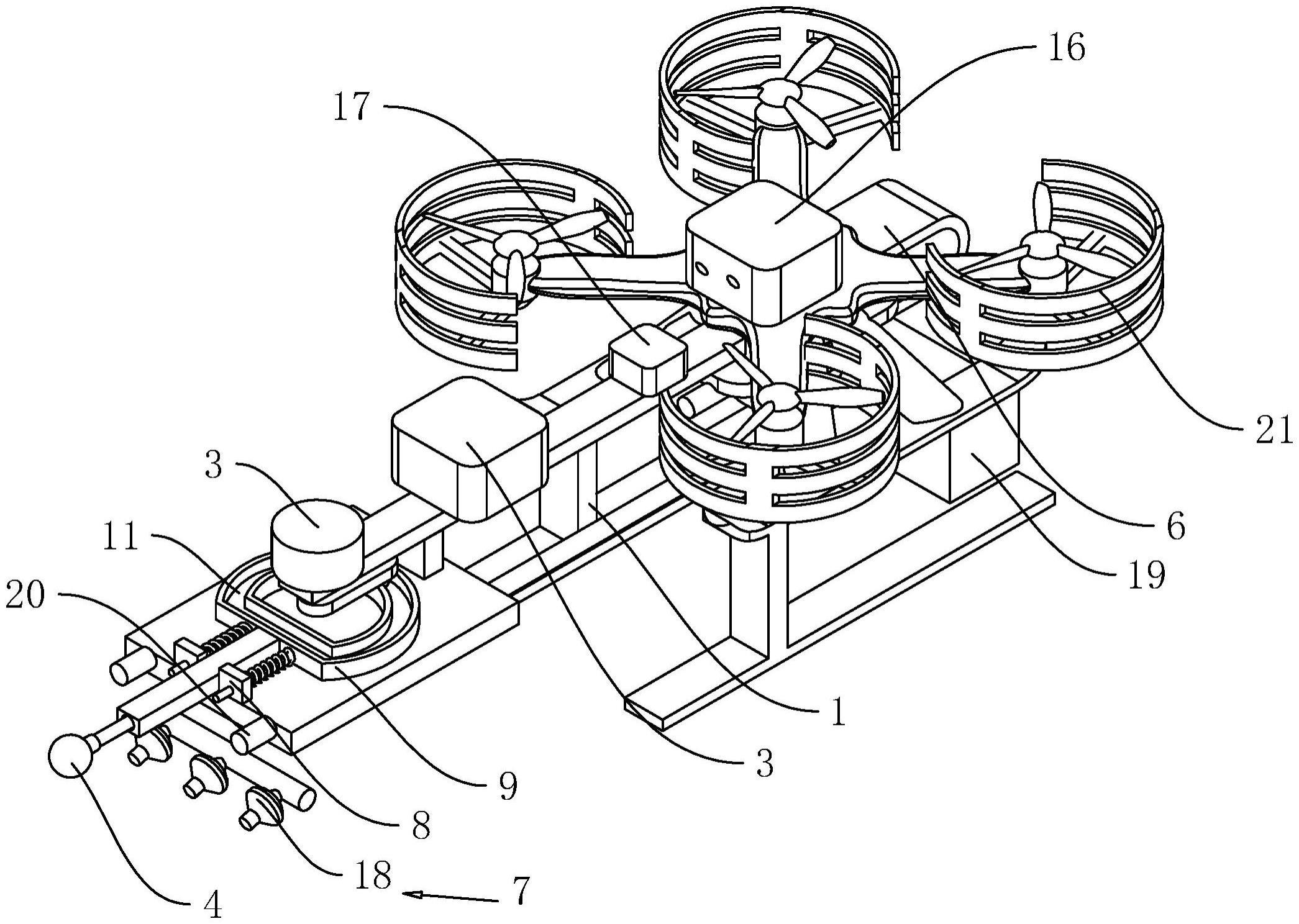
26.图1是本技术实施例中无人机的整体结构示意图。
27.图2是本技术实施例中驱动架部位处的结构示意图。
28.图3是本技术实施例中驱动架靠近敲击头的一端的剖视图,用于展示阻尼器的结
构。
29.图4是本技术实施例中记录装置的结构示意图。
30.附图标记:1、无人机本体;2、摄像器;3、控制盒;4、敲击头;5、驱动组件;6、采音装置;7、喷涂模块;8、引导轨;9、驱动架;10、转动杆;11、引导槽;12、驱动块;13、驱动件;14、阻尼器;15、减震弹簧;16、摄像头;17、记录装置;18、喷涂泵;19、料箱;20、视觉传感器;21、防撞栏;22、传输口;23、调节开关;24、显示屏;25、控制按键;26、驱动杆。
具体实施方式
31.以下结合附图1-4对本技术作进一步详细说明。
32.本技术实施例公开一种墙体检测无人机。
33.参照图1和图2,一种墙体检测无人机,包括无人机本体1,无人机本体1上设置有敲击头4,无人机本体1的侧壁上设置有用于驱使敲击头4向远离无人机本体1方向滑移的驱动组件5。无人机本体1在检测墙体的过程中,驱动组件5驱使敲击头4朝向墙体的外壁滑移,敲击头4敲击墙体的外壁。
34.参照图1和图2,无人机本体1的外壁上通过螺钉固定有控制盒3,控制盒3与无人机本体1的遥控器信号连接,工作人员通过控制无人机的遥控器与控制盒3配合使用,从而实现对无人机本体1的控制;驱动组件5包括通过螺钉固定在无人机本体1上的引导轨8、与引导轨8滑移连接的驱动架9和驱动杆26,本技术中引导轨8的截面呈u型设置,驱动架9的一端与引导轨8内腔滑移连接。
35.参照图2和图3,驱动架9与引导轨8滑移连接的部分呈中空设置,驱动架9的内腔内铰接有阻尼器14,阻尼器14的活塞杆上套设有减震弹簧15,敲击头4与阻尼器14的活塞杆固定连接,阻尼器14和减震弹簧15的配合,使得敲击头4与驱动架9柔性连接,减小敲击头4敲击墙体外壁的过程中产生的外力对无人机本体1的干扰。
36.参照图2,驱动架9的侧壁上开设有引导槽11,本技术中引导槽11的形状为d字型,驱动杆26的端部通过螺钉固定有驱动块12,本技术中驱动块12的形状呈圆柱型,驱动块12与驱动杆26呈垂直设置,无人机本体1的侧壁上转动连接有转动杆10,转动杆10与驱动杆26呈垂直设置,转动杆10与驱动杆26远离驱动块12的一端通过螺钉固定连接,无人机本体1的侧壁上设置有用于驱使转动杆10转动的驱动件13,驱动件13与控制盒3电连接,本技术中驱动件13优先选用电机,驱动件13的转轴与转动杆10同轴固定,启动驱动件13,驱动件13的转轴转动,从而带动转动杆10转动。
37.参照图1,无人机本体1的侧壁上通过螺钉固定有视觉传感器20,视觉传感器20的设置对无人机本体1至墙体外壁之间的距离进行监测,使得无人机本体1与墙体外壁之间保持一定的距离,减小无人机本体1撞至墙面上的可能性。
38.参照图1,无人机本体1的侧壁上设置有用于采集敲击头4敲墙的声音的采音装置6,采音装置6主要是采集敲击头4敲击墙面的声音,通过声音来判断墙体的外饰面是否空鼓。
39.参照图1和图4,无人机本体1上设置有用于采集墙体照片的摄像器2,摄像器2采用红外摄像器2,本技术中摄像器2包括可自行转动的摄像头16和用于记录摄像头16录像的记录装置17,本技术中记录装置17包括信息传输口22、调节开关23、显示屏24和控制按键25,
信息传输口22与摄像头16相连,显示屏24用于显示观察和记录摄像头16摄取到的结果,调节开关23可以调节显示屏24显示内容的角度和大小,控制按键25用于控制对显示内容进行确定操作。
40.参照图1,无人机本体1的侧壁上设置有用于在墙体上做标记的喷涂模块7,喷涂模块7包括通过螺栓固定在无人机本体1侧壁上的料箱19和通过螺栓固定在无人机本体1上的喷涂泵18,喷涂泵18的进油口与料箱19的内腔相通连接,喷涂泵18的出油口朝向敲击头4的方向,喷涂泵18与控制盒3电连接,采音装置6采集到空鼓现象后,启动喷涂泵18,喷涂泵18从料箱19中抽取染料,在墙体外壁上做标记,方便工作人员后续识别。
41.参照图1,无人机本体1的侧壁上通过螺钉固定有若干个防撞栏21,本技术中无人机采用四个螺旋桨的大江牌无人机,每个螺旋桨的位置均设置有防撞栏21,防撞栏21的设置减小无人机本体1上的螺旋桨与墙体外壁之间发生碰撞的可能性,从而减小无人机本体1被坠毁的可能性。
42.本技术实施例一种墙体检测无人机的实施原理为:工作人员需要对墙体进行检测时,通过无人机的遥控器和控制盒3配合使用,启动驱动件13,驱动件13的转轴转动,带动转动杆10转动,使得驱动杆26转动,驱动杆26带动驱动块12移动,驱动块12在引导槽11内滑移,从而带动驱动架9滑移,带动敲击头4朝向墙体外壁的方向滑移,敲打墙体的外壁,采音装置6对敲击头4敲击墙体的声音进行记录,当检测到空鼓的现象时,启动喷涂泵18,喷涂泵18在料箱19内抽取染料,对空鼓的位置进行标记;摄像头16的设置对墙体的外壁进行拍照,工作人员可以一次性完成对墙体外壁的拍照检测和空鼓检测。
43.以上均为本技术的较佳实施例,并非依此限制本技术的保护范围,故:凡依本技术的结构、形状、原理所做的等效变化,均应涵盖于本技术的保护范围之内。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。
