1.本发明涉及高速公路技术领域,尤其是涉及一种公路风险评估方法。
背景技术:
2.高速公路是重要的通行道路,目前很多车辆都已装备由硬件和软件共同构成的自动驾驶系统或辅助驾驶系统(以下统称为自动驾驶系统),由于装备自动驾驶系统的车辆具备在高速公路上自动行驶的功能,能够大大缓解驾驶员的疲劳程度,使得车辆在高速公路上自动行驶的需求日益增加。
3.然而,目前的高速公路大多都是为有人驾驶的车辆设计的,高速公路上很多严重的交通事故都与自动驾驶有关,因此,有必要对车辆在现有高速公路上使用自动驾驶功能的风险进行评估,以助于减少与自动驾驶有关的交通事故。
技术实现要素:
4.针对上述情况,本发明提供一种公路风险评估方法,其能够对车辆在高速公路上使用自动驾驶功能的风险评估提供参考,使公路风险评估具象化,有利于定量化评估车辆在高速公路被评估路段的自动驾驶风险,减少与自动驾驶有关的交通事故。
5.为实现上述目的,本发明提供如下技术方案:
6.本发明提供一种公路风险评估方法,其主要可以包括如下步骤:
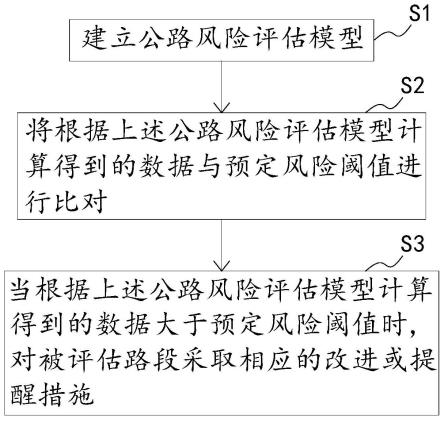
7.s1:建立以下公路风险评估模型:
[0008][0009]
式中:
[0010]
pq为被评估路段在晴天发生有人驾驶交通事故的概率;
[0011]
a为被评估路段出现有人驾驶交通事故的概率;
[0012]
k1为被评估路段在晴天和雨天时发生有人驾驶交通事故的概率之比;
[0013]
k2为有人驾驶与自动驾驶二者安全性的比值k2;
[0014]
k3为被评估路段的车道数,k3≥2;
[0015]
k4为被评估路段的长陡坡数量,k4≥1;
[0016]
k5为被评估路段的弯道数量,k5≥1;
[0017]
s2:将根据上述公路风险评估模型计算得到的数据与预定风险阈值进行比对;
[0018]
s3:当根据上述公路风险评估模型计算得到的y值大于预定风险阈值时,对被评估路段采取相应的改进或提醒措施。
[0019]
在本发明的一些实施例中,在步骤s1中,建立公路风险评估模型包括如下步骤:
[0020]
s11:获取高速公路被评估路段在预定时间段内的路况信息、交通信息、驾驶行为信息和天气信息;
[0021]
其中,
[0022]
路况信息包括被评估路段的车道数、长陡坡数量和弯道数量;
[0023]
交通信息包括车流量、有人驾驶的交通事故数量和事故严重程度;.
[0024]
驾驶行为信息包括驾驶员所驾驶的车辆在被评估路段采取的急加速、急减速和急并线的危险行为的数量;
[0025]
天气信息包括被评估路段在发生有人驾驶事故时是晴天还是雨天;
[0026]
s12:根据s11获取的信息得到:
[0027]
被评估路段的车道数k3、长陡坡数量k4和弯道数量k5;
[0028]
被评估路段分别在雨天发生有人驾驶事故的概率py和晴天发生有人驾驶交通事故的概率pq;
[0029]
被评估路段在晴天和雨天时发生有人驾驶交通事故的概率之比k1;
[0030]
被评估路段出现有人驾驶交通事故的概率a;以及
[0031]
定义有人驾驶与自动驾驶二者安全性的比值k2;
[0032]
s13:由s11和s12获得的数据分别得到采用车辆晴天时在被评估路段发生自动驾驶事故的风险y1,以及雨天时在被评估路段发生自动驾驶事故的风险y2;
[0033]
s14:求y1和y2的平均值,建立上述公路风险评估模型。
[0034]
在本发明的一些实施例中,定义有人驾驶与自动驾驶二者安全性的比值k2为
[0035][0036]
式中:
[0037]
c为驾驶员的驾驶行为评价系数,0>c<1,若驾驶员的驾驶行为越好、越安全,则c的值越接近于1;
[0038]
a为一般车辆的自动驾驶系统的硬件水平系数,0>a<1,若硬件水平越高,则a的值越接近于1;
[0039]
b为一般车辆的自动驾驶系统的软件水平系数,0>b<1,若软件水平越高,则b的值越接近于1。
[0040]
在本发明的一些实施例中,c的取值根据驾驶员在被评估路段采取急加速、急减速和急并线的危险行为的数量进行评估取值,上述危险行为的数量越少,c的取值就越接近于1;上述危险行为的数量越多,c的取值就越接近于0。
[0041]
在本发明的一些实施例中,在步骤s2中,根据步骤s1建立的公路风险评估模型,计算车辆在事故最频发路段发生自动驾驶事故的风险,从而得到预定风险阈值。
[0042]
在本发明的一些实施例中,在步骤s3中,当根据上述公路风险评估模型计算得到的y值大于预定风险阈值时,对被评估路段采取相应的改进或提醒措施包括:对被评估路段的路面或车道数进行扩展。
[0043]
在本发明的一些实施例中,在步骤s3中,当根据上述公路风险评估模型计算得到的y值大于预定风险阈值时,对被评估路段采取相应的改进或提醒措施包括:在被评估路段设立勿使用车辆自动驾驶功能的提醒或警告标识。
[0044]
在本发明的一些实施例中,在步骤s3中,当根据上述公路风险评估模型计算得到的y值大于预定风险阈值时,对被评估路段采取相应的改进或提醒措施包括:减少被评估路段的弯道数量。
[0045]
本发明实施例至少具有如下优点或有益效果:
[0046]
公路风险评估方法将复杂问题简单化,通过公路风险评估模型,能够对一般车辆在高速公路上使用自动驾驶功能的风险评估提供参考,使公路风险评估具象化,有利于定量化评估车辆在高速公路被评估路段的自动驾驶风险,以适应目前驾驶员对车辆在高速公路上自动行驶的需求日益增加的情况,减少与自动驾驶有关的交通事故。
[0047]
本发明的其他特征和优点将在随后的说明书中阐述,并且,部分地从说明书中变得显而易见,或者通过实施本发明而了解。
附图说明
[0048]
为了更清楚地说明本技术实施例或现有技术中的技术方案,下面将对实施例描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本技术的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
[0049]
图1为公路风险评估方法的流程图;
[0050]
图2为建立公路风险评估模型的流程图;
[0051]
图3为标定预定风险阈值的流程图。
具体实施方式
[0052]
在下文中,仅简单地描述了某些示例性实施例。正如本领域技术人员可认识到的那样,在不脱离本发明实施例的精神或范围的情况下,可通过各种不同方式修改所描述的实施例。
[0053]
下面结合附图对本发明的实施例进行详细说明。
[0054]
实施例
[0055]
请参照图1-图3,本实施例提供一种公路风险评估方法,用于评估具备自动驾驶功能的车辆在指定高速公路上的行驶风险,该公路风险评估方法主要可以包括如下步骤:
[0056]
s1:建立公路风险评估模型;
[0057]
s11:可结合大数据,从相应的数据库中抽样获取高速公路被评估路段在预定时间段内的路况信息、交通信息、驾驶行为信息和天气信息等信息数据;
[0058]
其中:
[0059]
上述数据库主要可以包括高速公路交通事故数据库和高速公路危险驾驶行为数据库,上述信息数据可从数据库中获取或者在实地勘察后记录得到。
[0060]
路况信息可从上述数据库获取,也可以实地勘察后记录,路况信息主要可以包括:被评估路段的车道数k3、长陡坡数量k4和弯道数量k5,k3≥2,k4≥1,k5≥1,一般而言,高速公路被评估路段的车道数越多,就说明被评估路段的级别越高,车辆行驶在被评估路段的风险也就越低;高速公路被评估路段的长陡坡数量和弯道数量越多,车辆行驶在被评估路段的风险也就越高;若被评估路段的长陡坡数量为0,则记k4=1,以此类推;若被评估路段的弯道数量为0,则记k5=1,以此类推;
[0061]
交通信息主要可以包括:车流量、有人驾驶的交通事故数量和事故严重程度等;
[0062]
驾驶行为信息主要可以包括:驾驶员所驾驶的车辆在被评估路段采取的急加速、
急减速、急并线等危险行为的数量;
[0063]
天气信息主要可以包括:被评估路段发生有人驾驶事故时的天气,从而获取到被评估路段发生事故时是晴天还是雨天(车辆在晴天和雨天行驶时的性能差异较大)。
[0064]
s12:有人驾驶交通事故的基数大,样本数量多,对s1抽样获得的信息数据进行统计、分析,并从中分别筛选出在雨天和晴天时,事故严重程度达到预定范围的有人驾驶的交通事故数量,从而可以得到被评估路段分别在雨天发生有人驾驶交通事故的概率py和晴天发生有人驾驶交通事故的概率pq(用预定时间段内的交通事故数量除以车流量,可以得到在预定时间段内发生有人驾驶的交通事故的概率),从而得到被评估路段在晴天和雨天时发生有人驾驶交通事故的概率之比k1和被评估路段出现有人驾驶交通事故的概率a分别为:
[0065][0066][0067]
在理想状态下,可认为自动驾驶的安全性无限接近于有人驾驶,此时可认为有人驾驶与自动驾驶二者安全性之比为1:1,但在实际中,还需要考虑到很多影响有人驾驶和自动驾驶的安全性的因数;在本实施例中,为了便于明确二者之间的关系,可以简单地定义有人驾驶与自动驾驶二者安全性的比值k2为:
[0068][0069]
其中:
[0070]
c为驾驶员的驾驶行为评价系数,0>c<1,若驾驶员的驾驶行为越好、越安全,则c的值越接近于1;具体的,c的取值可根据步骤s1统计的大多数驾驶员在被评估路段采取急加速、急减速和急并线等危险行为的数量进行评估取值,上述危险行为的数量越少,c的取值就越接近于1;上述危险行为的数量越多,c的取值就越接近于0;由于在不同被评估路段的路况不同,驾驶员的驾驶行为也有所差异,因此,针对不同被评估路段需分别确定驾驶员的驾驶行为评价系数c的取值;
[0071]
a为一般车辆的自动驾驶系统的硬件水平系数,0>a<1,若硬件水平越高,则a的值越接近于1;
[0072]
b为一般车辆的自动驾驶系统的软件水平系数,0>b<1,若软件水平越高,则b的值越接近于1;
[0073]
自动驾驶系统的硬件和软件的水平越高,则装配该自动驾驶系统的车辆应对各种路况的能力就越强,也就更安全;
[0074]
a和b的数值可在抽样调查后取平均值或众数,a和b的取值应反映出现有具备自动驾驶功能车辆的一般水平,从而使a和b的取值具有一定的普遍性、代表性。
[0075]
在不考虑天气、道路状况等因数的前提下,根据s2得到的a和k2,可以得到采用上述自动驾驶系统的车辆在被评估路段发生自动驾驶事故的概率pw为:
[0076][0077]
s13:由s11和s12获得的数据可分别得到采用上述自动驾驶系统的车辆晴天时在被评估路段发生自动驾驶事故的风险y1,以及雨天时在被评估路段发生自动驾驶事故的风险y2为:
[0078][0079][0080]
s14:求y1和y2的平均值,可得到采用上述自动驾驶系统的车辆在被评估路段发生自动驾驶事故的风险y为:
[0081][0082]
从而建立以下公路风险评估模型:
[0083][0084]
y值越小,则采用上述自动驾驶系统的车辆在被评估路段发生自动驾驶事故的风险越低;y值越大,则采用上述自动驾驶系统的车辆在被评估路段发生自动驾驶事故的风险越高。
[0085]
s2:将根据上述公路风险评估模型计算得到的数据y与预定风险阈值进行比对,当y的值大于预定风险阈值时,则说明被评估路段的风险较高,不适合车辆在被评估路段使用自动驾驶功能。
[0086]
上述预定风险阈值可按如下步骤标定:
[0087]
s21:从上述数据库中,抽样获取全国高速公路发生有人驾驶交通事故的路段,并筛选出事故最频发路段的路况信息、交通信息、驾驶行为信息和天气信息,从而获取到以下数据:
[0088]
事故最频发路段的车道数、长陡坡数量和弯道数量;
[0089]
事故最频发路段分别在雨天发生有人驾驶交通事故的概率和晴天发生有人驾驶交通事故的概率;
[0090]
事故最频发路段在晴天和雨天时发生有人驾驶交通事故的比值;
[0091]
事故最频发路段出现有人驾驶交通事故的概率;
[0092]
事故最频发路段有人驾驶与自动驾驶之间的安全性比值;
[0093]
s22:根据上述公路风险评估模型,计算车辆在事故最频发路段发生自动驾驶事故的风险y1,y1即为预定风险阈值。
[0094]
s3:当s3得到的y值大于预定风险阈值时,可对被评估路段采取相应的改进或提醒措施,例如可以对被评估路段的路面或车道数进行扩展、减少被评估路段的弯道数量、可以在被评估路段设立勿使用车辆自动驾驶功能的提醒或警告标识。
[0095]
综上,本实施例提供的公路风险评估方法将复杂问题简单化,通过上述公路风险评估模型,能够对一般车辆在高速公路上使用自动驾驶功能的风险评估提供参考,使公路风险评估具象化,有利于定量化评估车辆在高速公路被评估路段的自动驾驶风险,以适应目前驾驶员对车辆在高速公路上自动行驶的需求日益增加的情况,减少与自动驾驶有关的交通事故。
[0096]
最后应说明的是:以上仅为本发明的优选实施例而已,并不用于限制本发明,对于本领域的技术人员来说,本发明可以有各种更改和变化,在不冲突的情况下,本技术的实施例和实施例中的特征可以任意相互组合。凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。
