1.本发明属于船舶自主避碰领域,具体涉及一种狭窄水域船舶避碰算法。
背景技术:
2.如果狭窄水域存在船舶航行的障碍物,则可供船舶航行的水域宽度将进一步受限,瞭望视野也可能进一步受到阻碍。这种情况下,一方面,在船舶数量不变的情况下,密度增大,需要更频繁地进行避碰操。另一方面,水流的流速和流向会更加复杂,对船舶操纵会产生更为不利的影响。
3.目前的船舶避碰研究主要集中在开阔水域,针对狭窄水域的相对较少,一些用于开阔水域的避碰方法,如滚动窗口法、人工势场法经改进后用于狭窄水域,由于未能全面考虑到狭窄水域的如下限制条件,避碰效果较为有限:(1)航道变窄,船舶正常航行时相互间的距离相对较近,船舶的避碰空间受到限制,没有条件在较远的距离采取避碰动作;(2)船舶操纵人员的注意力集中于频繁的船舶操纵,及早判断与其他船舶或障碍物的相遇局面较为困难;(3)受到岛屿或其它船舶等遮挡,难以远距离发现来船。
技术实现要素:
4.本发明的目的在于克服上述现有技术中存在的不足,综合考虑狭窄水域的多种限制条件,有针对性地开发了一种船舶避碰算法,可对多种场景的障碍物进行有效规避,保证航行安全。
5.为实现上述发明目的,本发明提供一种狭窄水域船舶避碰算法,包括如下步骤:(1)对处于狭窄水域的本船周围的航行态势进行场景划分;(2)针对不同的会遇场景,建立来船的船舶航行态势估计模型;同时建立类人理解模型,通过类人理解模型获得来船的航行态势,并据此评估来船目的;(3)创建避碰知识库,所述避碰知识库中存放有船舶避碰过程中涉及的知识和规则;(4)在来船航行态的基础上,结合狭窄水域的特点和船舶的运动特性,基于所述避碰知识库进行避碰决策。
6.进一步地,步骤(1)中所述场景划分的依据包括:依据狭窄水道特点所构建的精确航行环境模型、航行信息、其他船只航行态势和海上避碰规则。
7.进一步地,所述步骤(4)中,通过粒子群优化算法对已知船舶运动状态的来船进行避碰决策。
8.进一步地,所述粒子群优化算法的步骤如下:(41)将避碰决策优化问题的可能的解都看作搜索空间中的一个“粒子”,并采用随机方式对各粒子的位置和速度进行初始化;(42)计算各粒子的适应度,并更新各粒子的最优值和整个粒子群的最优值;(43)更新各粒子的速度和位置,粒子的速度为粒子的当前速度、粒子个体的最优位置和粒子群的最优位置三者的加权和;粒子下一步的位置为粒子当前位置和速度之和;(44)重复上述步骤,直到算法终止,输出粒子群的最优值,即作为路径优化问题的全局最优解;算法终止条件为达到设置的迭代次数。
9.进一步地,所述步骤(4)中,通过基于滚动窗口的路径规划方法对未知船舶运动状态的来船进行避碰决策。
10.进一步地,所述基于滚动窗口的路径规划方法包括如下步骤:环境信息建模、障碍物运动轨迹预测、观测窗口实时探测、信息反馈、窗口局部规划和控制执行。
11.进一步地,步骤(3)中所述避碰知识库的创建依据包括内河避碰规则和避碰行动。
12.进一步地,所述避碰知识库包括事实库和规则库。
13.进一步地,所述事实库至少包括本船和来船类型、本船与来船行驶方向与航道走向的关系、本船与来船的会遇态势、航行水域、本船避让责任、避让措施。
14.进一步地,所述本船和来船类型至少包括机动船、帆船、人力船、限于吃水的海船和工程船。
15.进一步地,所述本船与来船行驶方向与航道走向的关系至少包括顺航道行驶的船舶、横越航道的船舶。
16.进一步地,所述本船与来船的会遇态势至少包括对遇、追越、交叉相遇、帆船相遇、不同类型船舶相遇。
17.进一步地,所述航行水域至少包括湖泊、水库、平流区域、潮流河段。
18.进一步地,所述本船避让责任至少包括让路船、直航船。
19.进一步地,所述避让措施至少包括转向、减速。
20.进一步地,所述规则库为用于描述船舶避碰规则的集合,船舶避碰规则以产生式表示,船舶避碰规则的前提和结论都是事实库中的事实,每条船舶避碰规则都由事实和逻辑运算符组成,结合航行的特点,船舶避碰规则包含逻辑运算“与”、“或”。
21.与现有技术相比,本发明的有益效果为:
22.综合考虑狭窄水域的多种限制条件,有针对性地开发了一种船舶避碰算法,可对静态障碍物、已知运动障碍物状态、未知运动障碍物状态、紧急避碰等多种场景的障碍物进行有效规避,保证航行安全。
附图说明
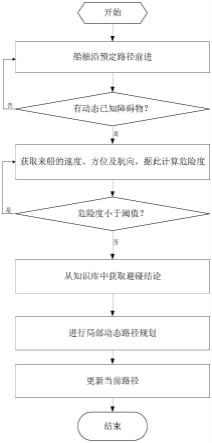
23.图1为本发明一个实施例的流程图(对已知船舶运动状态的来船);
24.图2为图1实施例中局部动态路径规划的流程图;
25.图3为本发明一个实施例的流程图(对未知船舶运动状态的来船)。
具体实施方式
26.下面结合附图和具体实施例,对本发明的技术方案做进一步说明。
27.如图1-图3所示,本发明狭窄水域船舶避碰算法的一个实施例,包括如下步骤:(1)对处于狭窄水域的本船周围的航行态势进行场景划分;(2)针对不同的会遇场景,建立来船的船舶航行态势估计模型;同时建立类人理解模型,通过类人理解模型获得来船的航行态势,并据此评估来船目的;(3)创建避碰知识库,所述避碰知识库中存放有船舶避碰过程中涉及的知识和规则;(4)在来船航行态的基础上,结合狭窄水域的特点和船舶的运动特性,基于所述避碰知识库进行避碰决策。
28.图1中,船舶沿着已经规划好的航线前进,在航行区域内监测到动态的已知障碍
物,获取来船的速度、方位及航向,计算危险度。若危险度小于阈值,则继续前进,若大于阈值,则执行避碰决策,根据已知信息获取避碰知识库结论,采用粒子群算法得出最优避碰方案,更新当前路径,完成避碰操作,继续沿着航线航行。
29.在一个实施例中,步骤(1)中所述场景划分的依据包括:依据狭窄水道特点所构建的精确航行环境模型、航行信息、其他船只航行态势和海上避碰规则。
30.在一个实施例中,所述步骤(4)中,通过粒子群优化算法对已知船舶运动状态的来船进行避碰决策。
31.在一个实施例中,所述粒子群优化算法的步骤如下:(41)将避碰决策优化问题的可能的解都看作搜索空间中的一个“粒子”,并采用随机方式对各粒子的位置和速度进行初始化;(42)计算各粒子的适应度,并更新各粒子的最优值和整个粒子群的最优值;(43)更新各粒子的速度和位置,粒子的速度为粒子的当前速度、粒子个体的最优位置和粒子群的最优位置三者的加权和;粒子下一步的位置为粒子当前位置和速度之和;(44)重复上述步骤,直到算法终止,输出粒子群的最优值,即作为路径优化问题的全局最优解;算法终止条件为达到设置的迭代次数。
32.在一个实施例中,所述步骤(4)中,通过基于滚动窗口的路径规划方法对未知船舶运动状态的来船进行避碰决策。
33.在一个实施例中,所述基于滚动窗口的路径规划方法包括如下步骤:环境信息建模、障碍物运动轨迹预测、观测窗口实时探测、信息反馈、窗口局部规划和控制执行。
34.在一个实施例中,步骤(3)中所述避碰知识库的创建依据包括内河避碰规则和避碰行动。
35.在一个实施例中,所述避碰知识库包括事实库和规则库。
36.在一个实施例中,所述事实库至少包括本船和来船类型、本船与来船行驶方向与航道走向的关系、本船与来船的会遇态势、航行水域、本船避让责任、避让措施。
37.在一个实施例中,所述本船和来船类型至少包括机动船、帆船、人力船、限于吃水的海船和工程船。
38.在一个实施例中,所述本船与来船行驶方向与航道走向的关系至少包括顺航道行驶的船舶、横越航道的船舶。
39.在一个实施例中,所述本船与来船的会遇态势至少包括对遇、追越、交叉相遇、帆船相遇、不同类型船舶相遇。
40.在一个实施例中,所述航行水域至少包括湖泊、水库、平流区域、潮流河段。
41.在一个实施例中,所述本船避让责任至少包括让路船、直航船。
42.在一个实施例中,所述避让措施至少包括转向、减速。
43.在一个实施例中,所述规则库为用于描述船舶避碰规则的集合,船舶避碰规则以产生式表示,船舶避碰规则的前提和结论都是事实库中的事实,每条船舶避碰规则都由事实和逻辑运算符组成,结合航行的特点,船舶避碰规则包含逻辑运算“与”、“或”。
44.最后应当说明的是:以上实施例仅用以说明本发明的技术方案而非对其限制,尽管参照上述实施例对本发明进行了详细的说明,所属领域的普通技术人员应当理解:依然可以对本发明的具体实施方式进行修改或者等同替换,而未脱离本发明精神和范围的任何修改或者等同替换,其均应涵盖在本发明的权利要求保护范围之内。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。
