1.本发明涉及水下机器人技术领域,具体涉及一种基于折纸原理的自适应性仿生脚蹼及伸缩运动方法。
背景技术:
2.随着人们对海洋资源的不断探索,水下软体机器人倍受科研人员的关注,仿生游动机器人伴随着水下机器人技术、材料技术的迅速发展,成为新兴领域的研究热点,在资源勘探和环境监测领域等有着广阔的应用前景。
3.目前,仿生脚蹼作为水下游动机器人的主要驱动方式之一,其结构的柔顺性和自适应性对机器人的运动效率有着很大的影响,现已研制的机器人的仿生脚蹼的结构较大且复杂,无法根据运动形式随时自主调整脚蹼结构,适应性差,存在的少有的脚蹼在改变运动形态时,还需要添加舵机或者气源驱动等外界装置来实现,这导致机器人的结构比较复杂,质量较重,大大降低了水下机器人的运动效率。
技术实现要素:
4.本发明为克服现有技术的不足,提供一种基于折纸原理的自适应仿生脚蹼及伸缩运动方法,
5.方案一:一种基于折纸原理的自适应仿生脚蹼主要由n组形变折展单元连接而成,每组形变折展单元包含两个动脚蹼、两排定脚蹼组和多个形变限位块;每排定脚蹼组包含多个定脚蹼,每排定脚蹼组的多个定脚蹼从近端到远端呈逐渐增大的方式排列,近端的定脚蹼内布置有单向摆动的动脚蹼,每排定脚蹼组中的横线折痕由近端至远端为峰线和谷线交替设置,相邻定脚蹼上有峰线折痕处的位置各设有呈横向布置的形变限位块,纵向上相邻两个形变限位块在脚蹼被推进展开后并在一起,相邻两排定脚蹼组的竖线折痕由近端至远端为峰线和谷线交替设置;相邻两组形变折展单元的竖线折痕由近端至远端为谷线和峰线交替设置,所述脚蹼展开后的外形呈扇形。
6.方案二:一种基于折纸原理的自适应仿生脚蹼的伸缩运动方法,所述方法的步骤为:初始状态时,脚蹼在介质中漂浮,动脚蹼置于推进运动时的受力一侧,在进行推进运动时,介质首先对脚蹼近端的峰线、动脚蹼和定脚蹼产生作用力,由于动脚蹼单向闭合,三者共同带动脚蹼开始沿峰线和谷线伸展,当脚蹼完全展开后,限位线张紧,阻止脚蹼的远端沿谷线收缩,同时峰线处的形变限位块开始闭合挤压,通过产生挤压作用力保证脚蹼不会产生过度形变,进而完成推进运动;在进行恢复运动时,动脚蹼在介质作用力下打开,形成单向排水,同时限位线和形变限位块瞬时失去作用力,在介质的挤压作用下,各个单元沿折痕自主收缩,减小了恢复阻力,如此反复操作无需提供额外的动力,实现脚蹼的伸展和收缩运动。
7.本发明相比现有技术的有益效果是:
8.一、本发明基于折纸原理,结合动脚蹼、定脚蹼、形变限制块、限位线以及峰线和谷
线的折痕路径仅仅依靠水的作用力即可实现脚蹼的伸展和收缩运动,在实现形态改变的同时,除去了外部驱动装置,优化了机器人的结构,提高了机器人的运动效率。
9.二、本发明在各个定脚蹼之间折痕柔性连接,与外界刚体接触时可以产生自适应形变,可以避免碰撞损伤,增强了其对外部环境的适应性。
10.三、本发明结构简单、重量轻、自适应性好、加工方便且成本低。
11.下面结合附图和实施例对本发明的技术方案作进一步地说明:
附图说明
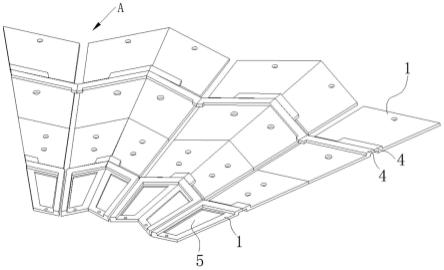
12.图1为本发明的仿生脚蹼展开示意图;
13.图2为从近端看的本发明仿生脚蹼收缩示意图;
14.图3为从远端看的本发明仿生脚蹼收缩示意图;
15.图4为布置于近端的动脚蹼与定脚蹼连接关系图;
16.图5为动脚蹼单向排水状态图;
17.图6为本发明的仿生脚蹼展开的简易结构图;
18.图7为本发明的仿生脚蹼展开的轴测图。
具体实施方式
19.下面将结合附图对本发明技术方案的实施例进行详细的描述。以下实施例仅用于更加清楚地说明本发明的技术方案,因此只作为示例,而不能以此来限制本发明的保护范围。
20.需要注意的是,除非另有说明,本技术使用的技术术语或者科学术语应当为本发明所属领域技术人员所理解的通常意义。
21.如图1-图6所示,一种基于折纸原理的自适应仿生脚蹼主要由n组形变折展单元a连接而成,每组形变折展单元a包含两个动脚蹼5、两排定脚蹼组和多个形变限位块4;每排定脚蹼组包含多个定脚蹼1,每排定脚蹼组的多个定脚蹼从近端到远端呈逐渐增大的方式排列,近端的定脚蹼1内布置有单向摆动的动脚蹼5,每排定脚蹼组中的横线折痕由近端至远端为峰线7和谷线6交替设置,相邻定脚蹼1上有峰线折痕处的位置各设有呈横向布置的形变限位块4,纵向上相邻两个形变限位块4在脚蹼被推进展开后并在一起,相邻两排定脚蹼组的竖线折痕由近端至远端为峰线7和谷线6交替设置;
22.相邻两组形变折展单元的竖线折痕由近端至远端为谷线6和峰线7交替设置,所述脚蹼展开后的外形呈扇形。其中n为大于等于1的整数。
23.所述的动脚蹼5和定脚蹼1均通过切割成型,可采用粘合的方式连接,可产生单向排水的功效。实线表示为峰线,即折痕突起,虚线表示为谷线,即折痕凹陷,所述的形变限位块4在脚蹼进行推进运动时可以合并(闭合挤压),产生挤压作用力以保证脚蹼在承受较大的作用力而不发生形变,同时也不会影响恢复运动的收缩程度。动脚蹼5置于推进运动时的受力一侧,且仅与其对应的定脚蹼1的一端粘合,在不影响推进效率的同时,可以在恢复运动时产生单向排水作用机理,提高恢复运动效率。
24.所述脚蹼径向长度和扩展面积可通过增加形变折展单元a径向的定脚蹼个数和单元的个数来调整,以适应不同的工作环境。
25.在推进运动时,随着水阻力越大,脚蹼的张开面积也逐渐增大,以此来增大与介质(如水)的接触面积,提高运动效率;在恢复运动时,脚蹼的张开面积随着水阻力越大的逐渐减小,通过减小与介质(如水)的接触面积来减小恢复阻力;另外,如果运动速度越快,脚蹼的收缩或张开力度也会随之越大,同样提高了运动效率。重要的是,脚蹼的伸展与恢复随着运动状态的改变而改变,无需机器人提供额外动力即可实现脚蹼的自适应形变,简化了机器人的结构。
26.进一步地,如图6和图7所示,每组形变折展单元还包含两根限位线3,每排定脚蹼组上设置限位线3,限位线3设置于脚蹼被推进运动时受力的一侧。其作用是在推进运动时防止脚蹼的远端受力沿谷线收缩,以保证足够的受力接触面积。
27.可选地,纵向上相邻两个形变限位块4展开时形成凹槽。开始运动的时候凹槽所在面正向受力产生推进,提高脚蹼在推进运动时的结构强度,同时由于形变限位块4设置于峰线处,对脚蹼的收缩程度不会产生影响,如图1所示的凹槽的背面是脚蹼恢复运动开始时的受力面。
28.可选地,相邻定脚蹼1的峰线7和谷线6均为柔性粘合连接。采用柔性粘合连接,与外界刚体接触时可以产生自适应形变,可以避免碰撞损伤,增强了其对外部环境的适应性。如图4和图5所示,动脚蹼5置于推进运动时的受力一侧,且仅与近端的定脚蹼1的一侧粘合,可以在恢复运动时产生单向排水作用机理,减小恢复阻力,提高恢复运动效率,同时还能在推进运动时保持闭合状态,不会对机器人的推进运动产生影响。
29.通常,所述定脚蹼1的材质为abs塑料。所述动脚蹼5的材质为pvc透明薄片。采用塑料材质质轻,便于加工制造和使用。所述动脚蹼5为薄板,其厚度为0.2-0.3mm。厚度较薄,便于使用。所述限位线3的材质为纤维。采用纤维线强度高,质量轻。如图6所示,在定脚蹼1上设置定位孔2,可选地,如图6和图7所示,在近端的定脚蹼1和远端的定脚蹼1上设置定位孔2,纤维线跨越近端的形变限位块4和峰线7,通过限位线3将两处的定脚蹼1相连接,以此防止脚蹼的中部在推进运动时沿着折痕谷线6收缩进而影响推进效率,
30.在横向折痕峰线7的两侧设置多处形变限位块4,在推进运动时,同一折痕处的两个形变限位块4会闭合挤压阻止形变,进而来提高脚蹼在推进运动时的结构强度,同时由于形变限位块4设置于峰线处,对脚蹼的收缩程度不会产生影响。
31.进一步地,形变限位块4与定脚蹼1一体制成。如此设置,加工使用方便。
32.基于上述方案,结合图1-图7所示,还提供一种基于折纸原理的自适应仿生脚蹼的伸缩运动方法,所述方法的步骤为:
33.初始状态时,脚蹼在介质中自然漂浮,动脚蹼5置于推进运动时的受力一侧,在进行推进运动时,介质首先对脚蹼近端的峰线7、动脚蹼5和定脚蹼1产生作用力,由于动脚蹼5单向闭合,三者共同带动脚蹼开始沿峰线7和谷线6伸展,当脚蹼完全展开后,限位线3张紧,阻止脚蹼的远端沿谷线收缩,同时峰线处的形变限位块4开始闭合挤压,通过产生挤压作用力保证脚蹼不会产生过度形变,进而完成推进运动;在进行恢复运动时,动脚蹼5在介质作用力下打开,形成单向排水,同时限位线3和形变限位块4瞬时失去作用力,在介质的挤压作用下,各个单元沿折痕自主收缩,减小了恢复阻力,如此反复操作无需提供额外的动力,实现脚蹼的伸展和收缩运动。本实施方式基于折纸原理实现了脚蹼的柔顺性和自适应性工作,简化了整体结构,提高了机器人的运动效率。
34.在推进运动时,随着水阻力越大,脚蹼的张开面积也逐渐增大,以此来增大与介质的接触面积,提高运动效率;在恢复运动时,脚蹼的张开面积随着水阻力越大的逐渐减小,通过减小与介质的接触面积来减小恢复阻力;另外,如果运动速度越快,脚蹼的收缩或张开力度也会随之越大,同样提高了运动效率。脚蹼的伸展与恢复随着运动状态的改变而改变,无需机器人提供额外动力即可实现脚蹼的自适应形变。
35.本发明已以较佳实施案例揭示如上,然而并非用以限定本发明,任何熟悉本专业的技术人员,在不脱离本发明技术方案范围内,当可以利用上述揭示的结构及技术内容做出些许的更动或修饰为等同变化的等效实施案例,均仍属本发明技术方案范围。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。
