1.本实用新型涉及起重机技术领域,特别是涉及一种自动变轨定位智能起重机系统。
背景技术:
2.在航空发动机生产的过程中,由于航空发动机需要非常高的安装精度,因此试验场地和检测场地不能处于同一个车间,然而普通自动定位起重机存在无法跨车间运行的缺陷,为解决这一缺陷,我们提出了一种自动变轨定位智能起重机系统。
技术实现要素:
3.本实用新型的目的就在于为了解决上述问题而提供一种自动变轨定位智能起重机系统。
4.本实用新型通过以下技术方案来实现上述目的:
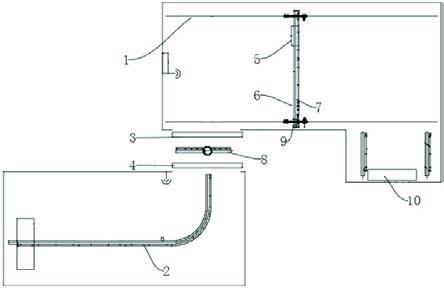
5.一种自动变轨定位智能起重机系统,包括大车,还包括安装在待检车间内供大车行走的大车轨道、安装在试验车间内的小车轨道a、安装在待检车间的自动门a、安装在试验车间的自动门b、过轨葫芦,大车沿其长度方向设有供过轨葫芦行走的小车轨道b;自动门a和自动门b相对设置,且自动门a和自动门b之间设有能够与小车轨道a、小车轨道b对轨的旋转轨道;小车轨道a、小车轨道b和旋转轨道对轨后形成一个供过轨葫芦行走的长轨道,大车上还设有对轨后能够固定旋转轨道的锁轨装置;
6.还包括电控系统,电控系统包括用于控制自动门a、自动门b打开或闭合以及控制旋转轨道转向的地面电控系统部分,用于控制大车行走或停止,以及旋转轨道与小车轨道a、小车轨道b对轨后锁轨装置进行锁轨或解锁的大车电控系统部分和用于控制过轨葫芦运行的过轨葫芦电控系统部分;地面电控系统部分与大车电控系统部分、过轨葫芦电控系统部分信号连接,大车电控系统部分与过轨葫芦电控系统部分信号连接。
7.优选的,地面电控系统部分内部的控制电路的连接关系为:车间三相ac380v电源连接到总断路器=01
‑
1q0的进线端,总断路器=01
‑
1q0的出线端与总接触器=01
‑
1k0的进线端相连接、与控制回路的断路器=01
‑
1f30的进线端相连接,控制回路的断路器=01
‑
1f30的出线端与变压器=01
‑
1t1的初级相连接,变压器=01
‑
1t1的次级与断路器=01
‑
1f31的进线端相连接,断路器=01
‑
1f31的出线端连接控制回路的供电线路、连接地面plc控制器=01
‑
plc的电源;总接触器=01
‑
1k0的出线端与断路器=18
‑
q10的进线端相连接、断路器=18
‑
q20的进线端相连接,断路器=18
‑
q10的出线端与旋转变频器=18
‑
u10的进线端相连接,旋转变频器=18
‑
u10的出线端与电机=18
‑
m10相连接;断路器=18
‑
q20的出线端与自动门变频器=18
‑
u20的进线端相连接,自动门变频器=18
‑
u20的出线端与电机=18
‑
m21、电机=18
‑ꢀ
m22相连接;地面plc控制器=01
‑
plc与人机交互界面、地面无线基站=01
‑
a10、旋转变频器=18
‑
u10、自动门变频器=18
‑
u20信号连接;地面无线基站=01
‑
a10与安装在待检间内的地面天线=01
‑
b10、安装在实验间内的地面天线=01
‑
b20信号连接。
8.优选的,大车电控系统部分内部的控制电路的连接关系为:起重机大车集电器=01
‑
e60在滑触线上滑动连接三相380v电源,集电器=01
‑
e60出线端连接到总断路器=01
‑
2q0的进线端,总断路器=01
‑
2q0的出线端与总接触器=01
‑
2k0的进线端相连接、与控制回路的断路器=01
‑
2f30的进线端相连接,控制回路的断路器=01
‑
2f30的出线端与变压器=01
‑
2t1的初级相连接,变压器=01
‑
2t1的次级与断路器=01
‑
2f31的进线端相连接,断路器=01
‑
2f31的出线端连接控制回路的供电线路、连接大车plc控制器=02
‑
plc的电源;总接触器=01
‑
2k0的出线端与断路器=12
‑
q40的进线端相连接、与断路器=12
‑
2q50的进线端相连接;断路器=12
‑
q40的出线端与大车变频器=12
‑
u40的进线端相连接,大车变频器=12
‑
u40的出线端与电机=12
‑
m41和电机=12
‑
m42相连接;断路器=12
‑
q50的出线端与推杆变频器=12
‑
u50的进线端相连接,推杆变频器=12
‑
u50的出线端与电机=12
‑
m51相连接;大车plc控制器=02
‑
plc与大车变频器=12
‑
u40、推杆变频器=12
‑
u50、大车无线终端=02
‑
a10、用于测量大车位置的大车激光测距仪=02
‑
v10信号连接;大车无线终端=02
‑
a10与安装在大车上的大车天线=02
‑
b10信号连接。
9.优选的,过轨葫芦电控系统部分内部的控制电路的连接关系为:过轨葫芦集电器=01
‑
e61在滑触线上滑动连接三相380v电源,集电器=01
‑
e61出线端连接到总断路器=01
‑
3q0的进线端,总断路器=01
‑
3q0的出线端与总接触器=01
‑
3k0的进线端相连接、与控制回路的断路器=01
‑
3f30的进线端相连接,控制回路的断路器=01
‑
3f30的出线端与变压器=01
‑
3t1的初级相连接,变压器=01
‑
3t1的次级与断路器=01
‑
3f31的进线端相连接,断路器=01
‑
3f31的出线端连接控制回路的供电线路、连接葫芦plc控制器=03
‑
plc的电源;总接触器=01
‑
3k0的出线端与断路器=10
‑
q30的进线端相连接、与断路器=05
‑
q10的进线端相连接,断路器=10
‑
q30的出线端与小车变频器=10
‑
u30的进线端相连接,小车变频器=10
‑
u30的出线端与电机=10
‑
m31相连接,断路器=05
‑
q10的出线端与起升变频器=05
‑
u10的进线端相连接,起升变频器=05
‑
u10的出线端与电机=05
‑
m11相连接;葫芦plc控制器=03
‑
plc与小车变频器=10
‑
u30、起升变频器=05
‑
u10、葫芦无线终端=03
‑
a10、用于测量葫芦位置的葫芦激光测距仪=03
‑
v10、起升编码器=03
‑
s10信号连接;葫芦无线终端=03
‑
a10与安装在葫芦上的葫芦天线=03
‑
b10信号连接。
10.有益效果在于:
11.1、自动门a、自动门b、旋转轨道、锁轨装置的设置实现了过轨葫芦能够在试验车间和待检车间之间行走,其保证了试验车间高度的密封性;
12.2、本实用新型具有自动变换轨道提高工作效率,安全性极高的功能,且满足了精度要求。
13.本实用新型的附加技术特征及其优点将在下面的描述内容中阐述地更加明显,或通过本实用新型的具体实践可以了解到。
附图说明
14.附图是用来提供对本实用新型的进一步理解,并且构成说明书的一部分,与下面的具体实施方式一起用于解释本实用新型,但并不构成对本实用新型的限制。在附图中:
15.图1是本实用新型的布局图;
16.图2是本实用新型的地面电控系统图;
17.图3是本实用新型的大车电控系统图;
18.图4是本实用新型的过轨葫芦电控系统图。
19.附图标记说明如下:
20.1、大车轨道;2、小车轨道a;3、自动门a;4、自动门b;5、过轨葫芦;6、大车;7、小车轨道b;8、旋转轨道;9、锁轨装置;10、人机交互界面。
具体实施方式
21.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。
22.在本实用新型的描述中,需要理解的是,术语“上”、“下”、“前”、“后”、“左”、“右”、“顶”、“底”、“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本实用新型和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本实用新型的限制。
23.实施例一,如图1
‑
4所示,一种自动变轨定位智能起重机系统,包括大车6,其特征在于:还包括安装在待检车间内供大车6行走的大车轨道1、安装在试验车间内的小车轨道a2、安装在待检车间的自动门a3、安装在试验车间的自动门b4、过轨葫芦5,大车6沿其长度方向设有供过轨葫芦5行走的小车轨道b7;自动门a3和自动门b4相对设置,且自动门a3和自动门b4之间设有能够与小车轨道a2、小车轨道b7对轨的旋转轨道8;小车轨道a2、小车轨道b7和旋转轨道8对轨后形成一个供过轨葫芦5行走的长轨道,大车6上还设有对轨后能够固定旋转轨道8的锁轨装置9;
24.还包括电控系统,电控系统包括用于控制自动门a3、自动门b4打开或闭合以及控制旋转轨道8转向的地面电控系统部分,用于控制大车6行走或停止,以及旋转轨道8与小车轨道a2、小车轨道b7对轨后锁轨装置9进行锁轨或解锁的大车电控系统部分和用于控制过轨葫芦5运行的过轨葫芦电控系统部分;地面电控系统部分与大车电控系统部分、过轨葫芦电控系统部分信号连接,大车电控系统部分与过轨葫芦电控系统部分信号连接。
25.实施例二,在实施例一的基础上,如图2所示,地面电控系统部分内部的控制电路的连接关系为:车间三相ac380v电源连接到总断路器=01
‑
1q0的进线端,总断路器=01
‑
1q0的出线端与总接触器=01
‑
1k0的进线端相连接、与控制回路的断路器=01
‑
1f30的进线端相连接,控制回路的断路器=01
‑
1f30的出线端与变压器=01
‑
1t1的初级相连接,变压器=01
‑
1t1的次级与断路器=01
‑
1f31的进线端相连接,断路器=01
‑
1f31的出线端连接控制回路的供电线路、连接地面plc控制器=01
‑
plc的电源;总接触器=01
‑
1k0的出线端与断路器=18
‑
q10的进线端相连接、断路器=18
‑
q20的进线端相连接,断路器=18
‑
q10的出线端与旋转变频器=18
‑
u10的进线端相连接,旋转变频器=18
‑
u10的出线端与电机=18
‑
m10相连接;断路器=18
‑
q20的出线端与自动门变频器=18
‑
u20的进线端相连接,自动门变频器=18
‑
u20的出线端与电机=18
‑
m21、电机=18
‑ꢀ
m22相连接;地面plc控制器=01
‑
plc与人机交互界面10、地面无线基站=01
‑
a10、旋转变频器=18
‑
u10、自动门变频器=18
‑
u20信号连接;地面无线基站=01
‑
a10与安装在待检间内的地面天线=01
‑
b10、安装在实验间内的地面天线=01
‑
b20信号连接。
26.实施例三,在实施例一的基础上,如图3所示,大车电控系统部分内部的控制电路
的连接关系为:起重机大车集电器=01
‑
e60在滑触线上滑动连接三相380v电源,集电器=01
‑
e60出线端连接到总断路器=01
‑
2q0的进线端,总断路器=01
‑
2q0的出线端与总接触器=01
‑
2k0的进线端相连接、与控制回路的断路器=01
‑
2f30的进线端相连接,控制回路的断路器=01
‑
2f30的出线端与变压器=01
‑
2t1的初级相连接,变压器=01
‑
2t1的次级与断路器=01
‑
2f31的进线端相连接,断路器=01
‑
2f31的出线端连接控制回路的供电线路、连接大车plc控制器=02
‑
plc的电源;总接触器=01
‑
2k0的出线端与断路器=12
‑
q40的进线端相连接、与断路器=12
‑
2q50的进线端相连接;断路器=12
‑
q40的出线端与大车变频器=12
‑
u40的进线端相连接,大车变频器=12
‑
u40的出线端与电机=12
‑
m41和电机=12
‑
m42相连接;断路器=12
‑
q50的出线端与推杆变频器=12
‑
u50的进线端相连接,推杆变频器=12
‑
u50的出线端与电机=12
‑
m51相连接;大车plc控制器=02
‑
plc与大车变频器=12
‑
u40、推杆变频器=12
‑
u50、大车无线终端=02
‑
a10、用于测量大车位置的大车激光测距仪=02
‑
v10信号连接;大车无线终端=02
‑
a10与安装在大车上的大车天线=02
‑
b10信号连接。
27.实施例四,在实施例一的基础上,如图4所示,过轨葫芦电控系统部分内部的控制电路的连接关系为:过轨葫芦集电器=01
‑
e61在滑触线上滑动连接三相380v电源,集电器=01
‑
e61出线端连接到总断路器=01
‑
3q0的进线端,总断路器=01
‑
3q0的出线端与总接触器=01
‑
3k0的进线端相连接、与控制回路的断路器=01
‑
3f30的进线端相连接,控制回路的断路器=01
‑
3f30的出线端与变压器=01
‑
3t1的初级相连接,变压器=01
‑
3t1的次级与断路器=01
‑
3f31的进线端相连接,断路器=01
‑
3f31的出线端连接控制回路的供电线路、连接葫芦plc控制器=03
‑
plc的电源;总接触器=01
‑
3k0的出线端与断路器=10
‑
q30的进线端相连接、与断路器=05
‑
q10的进线端相连接,断路器=10
‑
q30的出线端与小车变频器=10
‑
u30的进线端相连接,小车变频器=10
‑
u30的出线端与电机=10
‑
m31相连接,断路器=05
‑
q10的出线端与起升变频器=05
‑
u10的进线端相连接,起升变频器=05
‑
u10的出线端与电机=05
‑
m11相连接;葫芦plc控制器=03
‑
plc与小车变频器=10
‑
u30、起升变频器=05
‑
u10、葫芦无线终端=03
‑
a10、用于测量葫芦位置的葫芦激光测距仪=03
‑
v10、起升编码器=03
‑
s10信号连接;葫芦无线终端=03
‑
a10与安装在葫芦上的葫芦天线=03
‑
b10信号连接。
28.上述结构中,使用时,通过人机交互界面10输入指令,地面plc控制器=01
‑
plc将地面数据信号分别传输到大车plc控制器=02
‑
plc和葫芦plc控制器=03
‑
plc;大车plc控制器=02
‑
plc根据接收到的命令控制大车6行走到合适的位置,地面plc控制器=01
‑
plc控制自动门a3、自动门b4打开,旋转轨道8转向,完成与小车轨道a2、小车轨道b7对轨,大车plc控制锁轨装置9进行锁轨,锁轨完成后将命令传给葫芦plc控制器=03
‑
plc,过轨葫芦5自动从小车轨道b7行走到旋转轨道8上,最后行走到小车轨道a2上,最后过轨葫芦5到达目标位置自动停车。
29.以上显示和描述了本实用新型的基本原理、主要特征和优点。本行业的技术人员应该了解,本实用新型不受上述实施例的限制,上述实施例和说明书中描述的只是说明本实用新型的原理,在不脱离本实用新型精神和范围的前提下,本实用新型还会有各种变化和改进,这些变化和改进都落入要求保护的本实用新型范围内。本实用新型要求保护范围由所附的权利要求书及其效物界定。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。