1.本发明涉及林果收获机械,特别是一种适用于果林间收获过程的落地林果柔性张持动态分离捡拾装置及方法。
背景技术:
2.林果业是我国继粮食和蔬菜之后的第三大产业,各种林果栽培和种植的总面积一直居于世界首位,林果种类丰富,产业价值持续提高,在我国作物种植中有着重要的地位,其作物生产是一个潜力巨大的朝阳产业,具有非常广阔的发展场景。林果一般在其成熟后自动掉落时营养价值最高,因此为了更好地提高林果品质,人为地推迟林果收获期,使果园中的林果继续在果树枝上挂果,完成自然干燥的过程。但该种方式致使30~50%的林果自然脱落,形成落地林果,因此捡拾落地林果已成为林果收获的重要环节。
3.我国林果品种繁多,种植环境复杂,现有技术在实际收获过程中,仍以人工或简单器具辅助捡拾为主,存在劳动强度大、作业环境差(易被林果刺扎伤)、捡拾效率低(平均30kg/h)、人工费用高(约占果园成本的30%~50%)等问题,并且与其它作物收获期重叠,劳动力紧张,致使大量林果无法实时收获,造成严重经济损失。因此,实现落地林果机械化捡拾是林果产业发展的必然趋势。
4.现有技术的落地林果捡拾机械主要采用机械式和气力式,其中机械式按照作业形式可分为滚筒式、拨杆夹取式、刮板输送链式及挑钩式等,属于硬性接触,工作效率较高,易造成林果损伤、漏检、含杂高等现象,而气力式根据气力作业方向可分为气吸式和气吹式,属于柔性接触,损伤率低,但由于自身限制,现有风机负压不足,致使有效作业范围较小,并需要人工辅助,工作效率低,且含杂率较高。综上,现有落地林果捡拾机械已满足不了林果产业化、规模化的发展需求,已经成为制约林果作物产业化发展的一个瓶颈,因此,提高捡拾效率、降低含杂率和损伤率,以及提升落地林果捡拾自动化程度是落地林果收获技术亟待解决的问题。
技术实现要素:
5.本发明所要解决的技术问题是针对现有技术的上述缺陷,提供一种适用于果林间收获过程的落地林果柔性张持动态分离捡拾装置及方法。
6.为了实现上述目的,本发明提供了一种落地林果柔性张持动态分离捡拾装置,其中,包括:
7.机架;
8.拾取机构,安装在所述机架上,用于捡拾落地林果并进行初次分选,实现柔性张持捡拾落地林果;
9.齿式排果机构,安装在所述拾取机构上,所述拾取机构环绕所述齿式排果机构运动,并通过所述齿式排果机构将所述拾取机构内的林果自动排出,实现落地林果的动态分离;
10.中间集果机构,对应于所述齿式排果机构设置在所述机架上,用于收集所述齿式排果机构排出的林果,并提供林果分选空间;
11.风机,安装在所述机架上,风机的出风口与所述中间集果机构的进风口连接,以为所述林果分选空间提供稳定持续的气流;
12.林果分离机构,与所述中间集果机构连接,用于二次分选林果混合物;
13.传动机构,安装在所述机架上,并分别与所述拾取机构、风机及所述林果分离机构连接;以及
14.控制装置,安装在所述机架上,与所述传动机构连接,用于控制并实时调整所述传动机构的工作速度。
15.上述的落地林果柔性张持动态分离捡拾装置,其中,所述拾取机构包括:
16.拾取链,张紧在拾取链轮上,所述拾取链轮通过拾取轴安装在所述机架上;以及
17.捡拾轮,均匀间隔安装在所述拾取链上,所述捡拾轮包括弹性夹持条、凸捡拾条、凹捡拾条和锁紧盘,所述凸捡拾条和凹捡拾条的两端安装在所述锁紧盘上,所述弹性夹持条安装在所述凸捡拾条的外表面上。
18.上述的落地林果柔性张持动态分离捡拾装置,其中,所述锁紧盘的内侧开有与所述凹捡拾条和凸捡拾条适配的凹槽,以避免所述凹捡拾条及凸捡拾条滑动和松懈。
19.上述的落地林果柔性张持动态分离捡拾装置,其中,所述齿式排果机构包括对称并列安装在所述拾取轴上的齿条板,所述齿条板与所述捡拾轮相交,所述齿条板上的凸齿挤压所述凸捡拾条及凹捡拾条,使所述凸捡拾条与凹捡拾条之间的间隙增大,以实现林果的动态分离。
20.上述的落地林果柔性张持动态分离捡拾装置,其中,所述凹捡拾条安装在所述凸捡拾条之间,并位于所述凸捡拾条的下方,所述凹捡拾条与凸捡拾条的最大间隙小于落地林果的尺寸;同一所述凹捡拾条上,所述弹性夹持条之间的距离远小于落地林果的尺寸。
21.上述的落地林果柔性张持动态分离捡拾装置,其中,所述中间集果机构包括:
22.集果机构,包括互相连接形成第一容置空间的集果前板、集果后板、集果左侧板和集果右侧板,所述第一容置空间的顶端为集果入口,所述第一容置空间的底端为集果出口;以及
23.中间机构,包括互相连接形成第二容置空间的前板、后板、左侧板、顶板和底板,所述顶板设置有长条口,与所述集果出口连接;所述左侧板设置有与所述风机的出风口连接的进风口,所述第二容置空间与所述左侧板相对的一侧为出风口。
24.上述的落地林果柔性张持动态分离捡拾装置,其中,所述林果分离机构包括:
25.林果分离箱,包括分离箱体、分离板和挡板,所述分离箱体的左侧与所述中间机构的出风口连接;所述分离板和挡板分别安装在所述分离箱体内,并将所述分离箱体划分为分离室、第一沉降室和第二沉降室,所述第一沉降室的底端设置有杂质排出口,所述分离室的一侧设置有林果排出口,所述第一沉降室设置在所述分离室的另一侧;以及
26.拨轮分选机构,包括拨轮轴和拨轮块,所述拨轮轴安装在所述机架上,所述拨轮块周向均匀阵列分布在所述拨轮轴上形成拨轮组,所述拨轮组以轴向均匀阵列安装在所述拨轮轴上。
27.上述的落地林果柔性张持动态分离捡拾装置,其中,所述分离板上均匀间隔设置
有长条孔,所述长条孔与所述拨轮分选机构的拨轮组一一对应,以将杂质分选到所述第二沉降室中。
28.上述的落地林果柔性张持动态分离捡拾装置,其中,所述中间集果机构、林果分离机构及所述风机的连接表面分别设置有密封条,以增强密封性并降低气压损失。
29.为了更好地实现上述目的,本发明还提供了一种落地林果柔性张持动态分离捡拾方法,其中,包括如下步骤:
30.步骤s100、根据捡拾落地林果的对象,调节捡拾轮中的凹捡拾条及凸捡拾条之间的距离,便于捡拾不同种类的果实;
31.其中,凹捡拾条位于凸捡拾条的中间位置,其中捡拾轮中的凸捡拾条之间、凹捡拾条与凸捡拾条之间的距离l
max
=k
min
(r1,r2),k为经验系数,一般取0.25~0.50,r1为林果纵径,r2为林果横径;其中捡拾轮中的凸捡拾条旋转曲面的方程为a1、b1、c1分别为凸捡拾条旋转曲面的长半轴、中半轴和短半轴;凹捡拾条旋转曲面的方程为:a2、b2、c2分别为凹捡拾条旋转曲面的长半轴、中半轴和短半轴;a1=a2,b1‑
b2<l
max
,c1‑
c2<l
max
;
32.步骤s200、通过控制装置调节传动机构的风机电机、拨轮分选电机、拾取电机到预设值,并调试待所述传动机构运行平稳;
33.步骤s300、所述捡拾轮以顺时针方向运动,在弹性夹持条和所述凹捡拾条及凸捡拾条柔性张持的共同作用下,将地面上的落地林果通过夹持、挤压到所述捡拾轮中,实现捡拾果实过程,并进行初步分选;
34.步骤s400、所述捡拾轮运动到齿式排果机构上,所述凹捡拾条及凸捡拾条之间的间距在所述齿式排果机构的作用下变大,从而落地林果从所述凹捡拾条和凸捡拾条之间的间隔排出,自动完成林果自动动态分离过程;
35.其中,齿式排果机构的齿式与捡拾轮相交的宽度b
max
=e
max
(r1,r2),e为经验系数,一般取2~4;即齿式排果机构的齿式与捡拾轮相交的高度为:θ为齿式的倾角;捡拾轮中的凸捡拾条之间、凹捡拾条与凸捡拾条之间的距离l
max
=齿式排果机构的齿式与捡拾轮相交的宽度b
max
;
36.步骤s500、林果自由从上往下落到中间集果机构中,此时林果在风机的风力作用下,碎石、土块等较重杂质落到第一沉降室中,在气流和倾斜滚动的共同作用下从所述第一沉降室的出口排出;而林果、枣叶、枝条等较轻混合物被吹到分离室中,其中,沉降室的倾斜角度满足:tanθ>f,其中θ为沉降室的倾斜角度;f为碎石、土块等杂质与沉降室底面材料的摩擦系数;风机8产生的气流速度满足:max(v
e
,v
f
)<v
a
<v
g
,v
e
为枣叶、枝条等杂质的悬浮速度,v
f
为林果的悬浮速度,v
a
为风机产生的气流速度,v
f
为碎石、土块等杂质的悬浮速度;以及
37.步骤s600、在所述风机的风力和拨轮分选的共同作用下,果叶、枝条等杂质被分选到第二沉降室中,在倾斜滚动和拨轮分选机构拨动的共同作用下,从所述第二沉降室的出
口排出,林果在挡板和风力不足的作用下,落到所述分离室的底面,在气流和倾斜滚动的共同作用下从所述分离室的出口排出,完成落地林果捡拾过程,其中,分离室的倾斜角度满足:tanθ1>f1,其中θ1为沉降室的倾斜角度;f1为碎石、土块等杂质与沉降室底面材料的摩擦系数。
38.本发明的技术效果在于:
39.本发明实现了落地林果柔性张持
‑
动态分离捡拾过程,从根本上解决了落地林果捡拾效率低、损伤率高、含杂率高等问题,极大提高了林果捡拾效率,有效降低了损伤率和含杂率,达到高效低损、高质低杂的工作效果,可确保林果收获品质,解决了劳动强度大、作业成本高等问题,有效提升了落地林果捡拾性能和自动化程度。其中,根据捡拾落地林果的对象,调节捡拾轮中的捡拾条之间的距离,可实现不同种类林果捡拾;捡拾轮在弹性夹持条和凹捡拾条、凸捡拾条柔性张持的共同作用下,将地面上的林果夹持、挤压到捡拾轮中,实现落地林果柔性张持捡拾过程,捡拾条在齿式排果机构的作用下,其间的距离变大,从而林果从捡拾条之间的间隔排出,自动完成林果动态分离过程,有效提高林果捡拾效率,降低损伤率;林果混合物在二次分选的条件下,极大降低林果含杂率,其中捡拾轮在捡拾过程中,可初步筛选掉部分枝条、果叶、碎石、土块等杂质,完成一次分选;在气力和拨轮分选的共同作用下,再一次实现果实与枝条、果叶、碎石、土块等杂质分选,完成二次分选。
40.以下结合附图和具体实施例对本发明进行详细描述,但不作为对本发明的限定。
附图说明
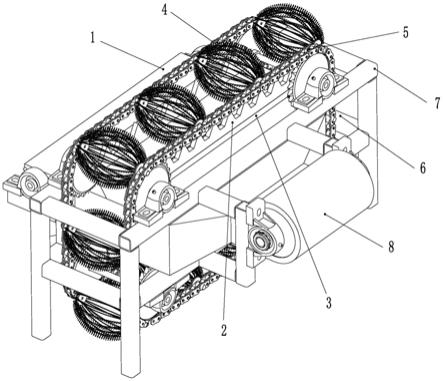
41.图1为本发明一实施例的装置整体结构示意图;
42.图2为本发明一实施例的拾取机构结构示意图;
43.图3为本发明一实施例的捡拾轮结构示意图;
44.图4为本发明一实施例的凸捡拾条结构示意图;
45.图5为本发明一实施例的凹捡拾条结构示意图;
46.图6为本发明一实施例的中间集果机构结构示意图;
47.图7为本发明一实施例的集果机构结构示意图;
48.图8为本发明一实施例的中间机构结构示意图;
49.图9为本发明一实施例的林果分离机构结构示意图;
50.图10为本发明一实施例的林果分离箱结构示意图;
51.图11为本发明一实施例的拨轮分选机构结构示意图;
52.图12为本发明一实施例的分离板结构示意图;
53.图13为本发明一实施例的齿式排果机构结构示意图。
54.其中,附图标记
55.1 林果分离机构
56.11 林果分离箱
57.111 分离板
58.112 分离箱体
59.113 挡板
60.114 分离室
61.115 第一沉降室
62.116 第二沉降室
63.12 拨轮分选机构
64.121 拨轮轴
65.122 拨轮块
66.2 齿式排果机构
67.3 中间集果机构
68.31 集果机构
69.311 集果右侧板
70.312 集果前板
71.313 集果左侧板
72.314 集果后板
73.32 中间机构
74.321 前板
75.322 顶板
76.323 左侧板
77.324 底板
78.325 后板
79.4 拾取机构
80.41 捡拾轮
81.411 锁紧盘
82.412 弹性夹持条
83.413 凸捡拾条
84.414 凹捡拾条
85.42 拾取链
86.43 拾取轴
87.44 拾取链轮
88.5 传动机构
89.6 控制装置
90.7 机架
91.8 风机
具体实施方式
92.下面结合附图对本发明的结构原理和工作原理作具体的描述:
93.参见图1,图1为本发明一实施例的装置整体结构示意图。落地林果柔性张持动态分离捡拾装置,包括:机架7;拾取机构4,固定安装在所述机架7上,用于捡拾落地林果并进行初次分选,实现柔性张持捡拾落地林果;齿式排果机构2,安装在所述拾取机构4上,所述拾取机构4环绕所述齿式排果机构2运动,并通过所述齿式排果机构2将所述拾取机构4内的林果自动排出,实现落地林果的动态分离;中间集果机构3,对应于所述齿式排果机构2设置
在所述机架7上,位于齿式排果机构2的下方,用于收集所述齿式排果机构2排出的林果,并提供林果分选空间;风机8,安装在所述机架7上,风机8的出风口与所述中间集果机构3的进风口连接,以为所述林果分选空间提供稳定持续的气流;林果分离机构1,与所述中间集果机构3连接,优选位于中间集果机构3的右侧,用于二次分选林果混合物;传动机构5,安装在所述机架7上,并分别与所述拾取机构4、风机8及所述林果分离机构1连接,包括风机传动机构,风机传动机构与风机8、风机电机连接;拨轮分选传动机构,拨轮分选传动机构与拨轮分选机构12、拨轮分选电机连接,拾取传动机构,拾取传动机构与拾取机构4、拾取电机连接;以及控制装置6,安装在所述机架7上,与所述传动机构5连接,用于控制并实时调整所述传动机构5的工作速度,本实施例中该控制装置6分别与风机电机、拨轮分选电机、拾取电机连接,可通过显示屏实时调整风机传动机构、拨轮分选传动机构、拾取传动机构的工作速度,风机传动机构、拨轮分选传动机构、拾取传动机构三个传动机构分别由各自电机提供动力。其中,所述中间集果机构3、林果分离机构1及所述风机8的内部和外部连接表面分别设置有密封条,用密封条封住以增强密封性,并降低气压损失。
94.参见图2及图5,图2为本发明一实施例的拾取机构4结构示意图,图3为本发明一实施例的捡拾轮41结构示意图,图4为本发明一实施例的凸捡拾条413结构示意图,图5为本发明一实施例的凹捡拾条414结构示意图。本实施例中,所述拾取机构4包括:拾取链42,张紧在拾取链轮44上,所述拾取链轮44通过拾取轴43安装在所述机架7上;以及捡拾轮41,均匀间隔安装在所述拾取链42上,所述捡拾轮41包括弹性夹持条412、凸捡拾条413、凹捡拾条414和锁紧盘411,所述凸捡拾条413和凹捡拾条414的两端固定安装在所述锁紧盘411上,所述弹性夹持条412安装在所述凸捡拾条413的外表面上。在柔性张持的挤压作用下,相邻凸捡拾条413夹持住落地林果,最终落地林果在下一个落地林果的挤压作用下,从凸捡拾条413和凹捡拾条414之间的间隙进入将到捡拾轮41中,从而完成落地林果捡拾过程,并可初步筛选掉部分枝条、果叶、碎石、土块等杂质。
95.其中,所述锁紧盘411的内侧开有与所述凹捡拾条414和凸捡拾条413适配契合的凹槽,以避免所述凹捡拾条414及凸捡拾条413滑动和松懈。所述凹捡拾条414安装在所述凸捡拾条413之间,并位于所述凸捡拾条413的下方,所述凹捡拾条414与凸捡拾条413的最大间隙小于落地林果的尺寸;同一所述凹捡拾条414上,所述弹性夹持条412之间的距离远小于落地林果的尺寸,确保其之间不会夹持落地林果。
96.参见图6
‑
图8,图6为本发明一实施例的中间集果机构3结构示意图,图7为本发明一实施例的集果机构31结构示意图,图8为本发明一实施例的中间机构32结构示意图。所述中间集果机构3包括集果机构31和中间机构32,集果机构31包括互相连接形成第一容置空间的集果前板312、集果后板314、集果左侧板313和集果右侧板311,所述第一容置空间的顶端为集果入口,所述第一容置空间的底端为集果出口;中间机构32包括互相连接形成第二容置空间的前板321、后板325、左侧板323、顶板322和底板324,所述顶板322设置有长条口,与所述集果出口连接,以保证林果准确落入到中间集果机构3中;所述左侧板323设置有与所述风机8的出风口连接的进风口,所述第二容置空间与所述左侧板323相对的一侧为出风口。
97.参见图9
‑
图11,图9为本发明一实施例的林果分离机构1结构示意图,图10为本发明一实施例的林果分离箱11结构示意图,图11为本发明一实施例的拨轮分选机构12结构示
意图。本实施例的所述林果分离机构1包括:林果分离箱11,包括分离箱体112、分离板111和挡板113,所述分离箱体112的左侧与所述中间机构32的出风口连接;所述分离板111和挡板113分别安装在所述分离箱体112内,并将所述分离箱体112划分为分离室114、第一沉降室115和第二沉降室116,所述第一沉降室115的底端设置有杂质排出口,用于排出碎石、土块等杂质,所述分离室114的一侧(优选右侧中间偏下)设置有林果排出口,用于排出林果;所述第一沉降室115设置在所述分离室114的另一侧;以及拨轮分选机构12,包括拨轮轴121和拨轮块122,所述拨轮轴121通过轴承安装在所述机架7上,所述拨轮块122周向均匀阵列分布在所述拨轮轴121上形成拨轮组,所述拨轮组以轴向均匀阵列安装在所述拨轮轴121上,可将枝条、果叶等杂质排到第二沉降室116中。
98.参见图12,图12为本发明一实施例的分离板111结构示意图。所述分离板111上均匀间隔设置有多个长条孔,所述长条孔与所述拨轮分选机构12的拨轮组一一对应,以便于将果叶和枝条等杂质分选到所述第二沉降室116中。
99.参见图13,图13为本发明一实施例的齿式排果机构2结构示意图。所述齿式排果机构2包括通过轴承对称并列安装在所述拾取轴上的齿条板,所述齿条板与所述捡拾轮41相交,所述齿条板上的凸齿挤压所述凸捡拾条413及凹捡拾条414,使所述凸捡拾条413与凹捡拾条414之间的间隙增大,以实现林果的动态分离。
100.本发明的落地林果柔性张持动态分离捡拾方法,包括如下步骤:
101.步骤s100、根据捡拾落地林果的对象,调节捡拾轮41中的凹捡拾条414及凸捡拾条413之间的距离,便于捡拾不同种类的果实;
102.其中,凹捡拾条414位于凸捡拾条413的中间位置,其中捡拾轮41中的凸捡拾条413之间、凹捡拾条414与凸捡拾条413之间的距离l
max
=k
min
(r1,r2),k为经验系数,一般取0.25~0.50,r1为林果纵径,r2为林果横径;其中捡拾轮41中的凸捡拾条413旋转曲面的方程为a1、b1、c1分别为凸捡拾条413旋转曲面的长半轴、中半轴和短半轴;凹捡拾条414旋转曲面的方程为:a2、b2、c2分别为凹捡拾条414旋转曲面的长半轴、中半轴和短半轴;a1=a2,b1‑
b2<l
max
,c1‑
c2<l
max
;
103.步骤s200、通过控制装置6调节传动机构5的风机电机、拨轮分选电机、拾取电机到预设值,并调试待所述传动机构5运行平稳;
104.步骤s300、所述捡拾轮41以顺时针方向运动,在弹性夹持条412和所述凹捡拾条414及凸捡拾条413柔性张持的共同作用下,将地面上的落地林果通过夹持、挤压到所述捡拾轮41中,实现捡拾果实过程,并进行初步分选;
105.步骤s400、所述捡拾轮41运动到齿式排果机构2上,所述凹捡拾条414及凸捡拾条413之间的间距在所述齿式排果机构2的作用下变大,从而落地林果从所述凹捡拾条414和凸捡拾条413之间的间隔排出,自动完成林果自动动态分离过程;
106.其中,齿式排果机构2的齿式与捡拾轮41相交的宽度b
max
=e
max
(r1,r2),e为经验系数,一般取2~4;即齿式排果机构2的齿式与捡拾轮41相交的高度为:θ为齿
式的倾角;捡拾轮41中的凸捡拾条413之间、凹捡拾条414与凸捡拾条413之间的距离l
max
=齿式排果机构2的齿式与捡拾轮41相交的宽度b
max
;
107.步骤s500、林果自由从上往下落到中间集果机构3中,此时林果在风机8的风力作用下,碎石、土块等较重杂质落到第一沉降室115中,在气流和倾斜滚动的共同作用下从所述第一沉降室115的出口排出;而林果、枣叶、枝条等较轻混合物被吹到分离室114中,其中,沉降室的倾斜角度满足:tanθ>f,其中θ为沉降室的倾斜角度;f为碎石、土块等杂质与沉降室底面材料的摩擦系数;风机8产生的气流速度满足:max(v
e
,v
f
)<v
a
<v
g
,v
e
为枣叶、枝条等杂质的悬浮速度,v
f
为林果的悬浮速度,v
a
为风机8产生的气流速度,v
f
为碎石、土块等杂质的悬浮速度;以及
108.步骤s600、在所述风机8的风力和拨轮分选的共同作用下,果叶、枝条等杂质被分选到第二沉降室116中,在倾斜滚动和拨轮分选机构12拨动的共同作用下,从所述第二沉降室116的出口排出,林果在挡板113和风力不足的作用下,落到所述分离室114的底面,在气流和倾斜滚动的共同作用下从所述分离室114的出口排出,完成落地林果捡拾过程,其中,分离室114的倾斜角度满足:tanθ1>f1,其中θ1为沉降室的倾斜角度;f1为碎石、土块等杂质与沉降室底面材料的摩擦系数。
109.工作过程中,各个传动机构5转动平稳后,拾取机构4采用弹性夹持条412和凹捡拾条414、凸捡拾条413柔性张持的方式,将落地林果通过夹持、挤压过程捡拾起来,并可初步筛选掉部分枝条、果叶、碎石、土块等杂质,完成一次分选;然后在齿式排果机构2的作用下完成林果自动动态分离过程,林果自由从上往下落到中间集果机构3中,此时林果在风机8产生的气力作用下,土块、碎石等杂质分选到第一沉降室115中;林果、果叶、枝条等混合物分选到分离室114中,通过拨轮分选机构12的缠绕以及气流的作用把果叶与枝条等分选出去,排到第二沉降室116,完成二次分选,最后林果在挡板113和气力不足的作用下,落到分离室114的底面,完成林果捡拾工作。
110.本发明的装置及方法可以实现落地林果柔性张持
‑
动态分离捡拾过程,从根本上解决了落地林果捡拾效率低、损伤率高、含杂率高等问题,达到高效低损、高质低杂的工作效果,确保林果收获品质,有效提升了落地林果捡拾性能和自动化程度。其中,根据捡拾落地林果的对象,调节捡拾轮41中的凹捡拾条414、凸捡拾条413之间的距离,可实现不同种类林果捡拾;捡拾轮41在弹性夹持条412和凹捡拾条414、凸捡拾条413柔性张持的共同作用下,将地面上的林果通过夹持、挤压到捡拾轮41中,实现落地林果柔性张持捡拾过程,并凹捡拾条414、凸捡拾条413在齿式排果机构2的作用下,其间的距离变大,从而林果从凹捡拾条414、凸捡拾条413之间的间隔排出,自动完成林果动态分离过程,有效提高林果捡拾效率,降低损伤率;林果混合物在二次分选的条件下,极大降低林果含杂率,其中捡拾轮41在捡拾过程中,可初步筛选掉部分枝条、果叶、碎石、土块等杂质,完成一次分选;在气力和拨轮分选的共同作用下,再一次实现果实与枝条、果叶、碎石、土块等杂质分选,完成二次分选。
111.本发明极大提高了林果捡拾效率,有效降低了损伤率、含杂率及劳动强度和作业成本,确保了林果收获品质,从根本上解决了落地林果捡拾效率低、损伤率高、含杂率高、劳动强度大、作业成本高等问题,有效提升了落地林果捡拾性能和自动化程度,达到高效低损、高质低杂的工作效果。
112.当然,本发明还可有其它多种实施例,在不背离本发明精神及其实质的情况下,熟悉本领域的技术人员当可根据本发明作出各种相应的改变和变形,但这些相应的改变和变形都应属于本发明所附的权利要求的保护范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。

