1.本实用新型属于售货柜的技术领域,具体涉及自动售货柜。
背景技术:
2.现有的智能售货柜是通过采用1)扫码开门,开门取货,关门结账的购物方式或2)扫码支付,商品从货道掉落到取货口,手推开取货口取货3)扫码支付,升降台上下(有的还有左右移动)移到货品层,货品掉落在升降平台上,升降平台再上下(有的还有左右移动)将商品移动到出货口。
3.随着酒店,网吧等场所服务的智能化,智能售货柜不仅要能提供人当面购买取货,还要能够同时支持机器人自动从货柜中取货-即用户远程在房间内/网吧桌扫码,机器人自动接物配送。现有技术中,如图1所述的送货机器人,包括机器人本体61、信息发射口62和机器人货舱63,信息发射口62设置在机器人本体61的下方,信息发射口62采用激光雷达,机器人货舱63开设在机器人本体61的上部。
4.由于目前多数配送机器人只有货舱没有机械手,目前前述1),2)两种方式不能支持机器人从货柜中取货;3)的实现方式中有部分售货柜能够通过取货口的翻转门和滑道等方式将货品送入打开的机器人货舱,但是对应的升降机和配套的传送结构过于复杂,故障率高,容易卡货。
技术实现要素:
5.本实用新型的目的是提供自动售货柜,用以解决现有技术中存在的上述问题。
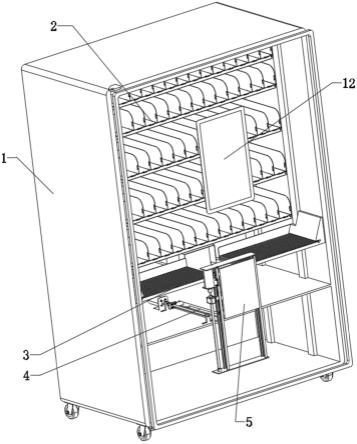
6.为了实现上述目的,本实用新型采用以下技术方案:一种自动售货柜,包括柜体和放置物品的置物架,所述置物架安装在柜体内,还包括传送物品的出货机构,所述出货机构安装在置物架的下方;
7.所述出货机构包括承接并传送置物架投下物品的横向出货组件和承接并传送横向出货组件投下物品的传送纵向出货组件,所述横向出货组件设置在柜体的正面,所述横向出货组件设置有两个,所述纵向出货组件设置在两个横向出货组件之间;
8.所述纵向出货组件包括平推结构和传送物品的传送结构,所述平推结构安装在柜体上,平推结构用于推动传送结构移动,所述传送结构设置在平推结构上。
9.优选地,所述横向出货组件包括安装架、横向电机、横向主动轴、横向从动轴和横向传送带,所述安装架安装在柜体的侧面,所述横向电机安装在安装架上,所述横向主动轴和横向从动轴分别转动连接在安装架的两端,所述横向传送带绕在横向主动轴和横向从动轴上,所述横向电机的电机轴同轴固定在横向主动轴上。
10.优选地,所述横向出货组件还包括倾斜板,所述倾斜板固定在柜体的内部。
11.优选地,所述平推结构包括导轨、第一推杆电机、推杆、连接板和滚轮,所述导轨安装在柜体上,所述第一推杆电机安装在柜体上,所述推杆伸缩连接在第一推杆电机上,所述连接板一端安装在推杆上,另一端安装在传送结构上,所述滚轮转动连接在传送结构上,所
述滚轮滚动于导轨内。
12.优选地,所述传送结构包括侧板、纵向电机、纵向主动轴、纵向从动轴和纵向传送带,所述纵向电机安装在侧板上,所述纵向主动轴和纵向从动轴分别转动连接在侧板的两端,所述纵向传送带环绕在向主动轴和纵向从动轴上,所述纵向电机的电机轴与纵向主动轴固定。
13.优选地,所述柜体上设置有出料口。
14.优选地,所述出料口处设置有取料组件,所述取料组件包括滑轨、第二推杆电机、滑轮和密封板,所述滑轨固定在出料口处,所述第二推杆电机固定在滑轨上,所述第二推杆电机的推杆通过连接板与密封板连接,所述滑轮安装在密封板的侧面。
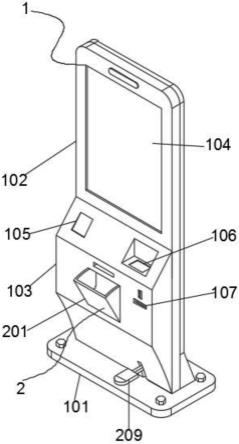
15.优选地,所述柜体的正面设置有观察窗口,所述观察窗口处固定有玻璃面板。
16.优选地,所述柜体的正面设置有操作面板。
17.优选地,所述所述柜体的正面设置有机器人接货定位口。
18.有益效果:当置物架的物品掉落时,首先被横向出货组件承接,物品经过横向出货组件传送至纵向出货组件处,最后,物品经过纵向出货组件,在出料口的取料组件(自动门)打开后,被传送出柜体。其中,在人当面购买场景即人取商品时,纵向出货组件伸到自动门外面,纵向出货组件上的物品皮带无需转动,由人从出货组件上取走物品;而在用户远程购物机器人来自动取货时,纵向出货组件伸到自动门外面,与已经到达了取货位置并打开机器人货舱的机器人的舱口衔接(送物机器人通过信息发射口来精确定位取货位置),然后纵向出货组件上的皮带转动将物品送入机器人货舱。本技术具有提高用户的取货便捷度。
附图说明
19.图1为现有技术送货机器人的结构示意图。
20.图2为本技术实施例一的结构示意图。
21.图3为本技术实施例一中删去玻璃面板的结构示意图。
22.图4为本技术实施例一中删去柜体正面的结构示意图。
23.图5为本技术实施例一中横向出货组件和纵向出货组件的结构示意图。
24.图6为本技术实施例一中平推结构的结构示意图。
25.图7为本技术实施例一中取料组件的结构示意图。
26.图8为本技术实施例二的结构示意图。
27.图中:1、柜体;10、出料口;11、观察窗口;12、玻璃面板;13、操作面板;14、机器人接货定位口;2、置物架;3、横向出货组件;31、安装架;311、货物引导件一;32、横向电机;33、横向主动轴;34、横向从动轴;35、横向传送带;36、倾斜板;4、纵向出货组件;41、平推结构;411、导轨;412、第一推杆电机;413、推杆;414、连接板;415、滚轮;42、传送结构;421、侧板;422、纵向电机;423、纵向主动轴;424、纵向从动轴;425、纵向传送带;5、取料组件;51、滑轨;52、第二推杆电机;53、滑轮;54、密封板;61、机器人本体;62、信息发射口;63、机器人货舱。
具体实施方式
28.为了更清楚地说明本实用新型实施例或现有技术中的技术方案,下面将结合附图和实施例或现有技术的描述对本实用新型作简单地介绍,显而易见地,下面关于附图结构
的描述仅仅是本实用新型的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。在此需要说明的是,对于这些实施例方式的说明用于帮助理解本实用新型,但并不构成对本实用新型的限定。
29.实施例一:本实施例提供了一种自动售货柜,包括柜体1和放置物品的置物架2,置物架2的数量设置有五层,每层置物架2的放货通道设为10-20个,置物架2通过螺栓固定在柜体1内,还包括传送物品的出货机构,出货机构安装在置物架2的下方,出货机构用于将置物架2上的物品从置物架2上传送出柜体1;出货机构包括承接并传送置物架2投下物品的横向出货组件3和承接并传送横向出货组件3投下物品的传送纵向出货组件4,横向出货组件3的数量设置有两个,纵向出货组件4的数量设置有一个,纵向出货组件4位于两个横向出货组件3之间,且纵向出货组件4的高度低于横向出货组件3的高度;横向出货组件3设置在柜体1的正面,纵向出货组件4设置在柜体1的背面。当置物架2的物品掉落时,首先被横向出货组件3承接,物品经过横向出货组件3传送至纵向出货组件4处,最后,物品经过纵向出货组件4被传送出柜体1。
30.在其中一个实施例中,横向出货组件3包括安装架31、横向电机32、横向主动轴33、横向从动轴34和横向传送带35,安装架31通过螺栓固定在柜体1的侧面,横向电机32通过螺栓固定在安装架31上,横向主动轴33和横向从动轴34通过轴承分别转动连接在安装架31的两端,横向传送带35绕在横向主动轴33和横向从动轴34上,横向电机32的电机轴与横向主动轴33通过皮带连接并传动。
31.具体的,安装架31为矩形框架,安装架31上靠近柜体1侧面的一侧通过焊接固定有货物引导件一311,货物引导件一311为直角梯形,直角梯形的斜边朝横向传送带35一侧;当置物架2上的物品掉落至横向传送带35上时,横向电机32启动,横向电机32带动横向主动轴33转动,横向主动轴33的转动带动横向传送带35在横向主动轴33和横向从动轴34环绕运动,进而带动横向传送带35上的物品被传送。
32.本实施例中,横向出货组件3保证物品在横向移动较平顺,同时,保证物品传送至纵向出货组件4处。
33.在其中一个实施例中,纵向出货组件4包括平推结构41和传送物品的传送结构42,平推结构41安装在柜体1上,平推结构41用于推动传送结构42移动,传送结构42设置在平推结构41上。
34.具体的,纵向出货组件4与横向出货组件3在空间内相互垂直,且纵向出货组件4的高度低于横向出货组件3的高度。
35.本实施例中,平推结构41用于将物品推出柜体1,传送结构42用于将物品传送至机器人货舱63,提高物品在纵向上的传送效率。
36.在其中一个实施例中,平推结构41包括导轨411、第一推杆电机412、推杆413、连接板414和滚轮415,导轨411安装在柜体1内,第一推杆电机412安装在柜体1上,推杆413伸缩连接在第一推杆电机412上,连接板414一端通过螺栓固定在推杆413上,另一端通过螺栓固定在传送结构42上,滚轮415转动连接在传送结构42上,滚轮415的数量设置有多个;滚轮415滚动于导轨411内。
37.具体的,导轨411的数量设置为四个,四个导轨411分别位于传送结构42的两侧,第一推杆电机412带动推杆413伸缩,推杆413的伸缩运动通过连接板414带动传送结构42上的
滚轮415沿导轨411的延伸方向移动。
38.本实施例中,平推结构41和传送结构42的一并传送物品;平推结构41用于将纵向出货组件上的物品送出柜体外以方便人取物,同时也为了在机器人取物场景下将纵向出货组件的外边缘与机器人货舱边缘做好衔接;传送结构42是在出货组件的外边缘与机器人货舱边缘衔接后将物品传送到机器人货舱内。
39.在其中一个实施例中,传送结构42包括侧板421、纵向电机422、纵向主动轴423、纵向从动轴424和纵向传送带425,侧板421的数量为两个,两个侧板421相互平行,且两个侧板421通过矩形板焊接固定,纵向电机422通过螺栓固定在侧板421上,纵向主动轴423和纵向从动轴424均通过轴承转动连接在侧板421的两个侧板421之间的两端,纵向传送带425环绕在向主动轴423和纵向从动轴424上,纵向电机422的电机轴与纵向主动轴423通过皮带连接并传动。
40.具体的,纵向电机422带动纵向主动轴423转动,主动轴423的转动带动纵向传送带425绕纵向主动轴423和纵向从动轴424进行环绕运动,进而传送纵向传送带425上的物品移动。
41.本实施例中,传送结构42驱动物品沿纵向上移动。
42.在其中一个实施例中,柜体1上设置有出料口10,出料口10为矩形,且位于柜体1的正面;出料口10处设置有取料组件5,取料组件5包括滑轨51、第二推杆电机52、滑轮53和密封板54,滑轨51的数量设置为四个,四个滑轨51相互平行,四个滑轨51通过螺栓固定在出料口10处,第二推杆电机52通过螺栓固定在滑轨51上,第二推杆电机52的推杆通过连接板与密封板54连接,滑轮53安装在密封板54的侧面。
43.具体的,当需要有物品取出时,第二推杆电机52带动其推杆伸长,第二推杆电机52的推杆伸长带动密封板54向下运动,密封板54向下运动过程中,滑轮53沿滑轨51的延伸方向滚动。
44.本实施例中,实现取料组件5的自动开启与关闭。
45.柜体1的正面设置有观察窗口11,观察窗口11处通过黏结固定有玻璃面板12,玻璃面板12为透明的玻璃。
46.柜体1的正面设置有操作面板13,操作面板13用于用户操作该设备。
47.柜体1的正面设置有机器人接货定位口14,机器人接货定位口14用于辅助机器人接货时精准定位到取货点,使得机器打开货舱后能与货柜的纵向出货组件4衔接。
48.实施例二:与实施例一不同之处在于,在其中一个实施例中,横向出货组件3还包括倾斜板36,倾斜板36通过螺栓固定在柜体1的内部。
49.具体的,倾斜板36为矩形板,倾斜板36的顶边通过螺栓固定在柜体1的侧面,倾斜板36的底边延伸至纵向出货组件4的正上方。当货物掉落至倾斜板36表面上时,物品依靠自身的重量沿倾斜板36的延伸方向向下滑动,最终滑落至纵向出货组件4上。
50.本实施例中,在不需要外加动力源的前提下,即可完成物品在横向上的移动,降低能耗,也降低成本。
51.最后应说明的是:以上所述仅为本实用新型的优选实施例而已,并不用于限制本实用新型的保护范围。凡在本实用新型的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本实用新型的保护范围之内。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。