1.本发明涉及发动机起动装置,尤其涉及在发动机起动时执行回摆控制(swing back control)的发动机起动装置,其中该回摆控制是在将曲轴反转驱动至规定范围之后再切换到正转驱动的控制。
背景技术:
2.以往,已知一种将在通过来自蓄电池的供给电力而驱动的同时在被驱动状态下发电的acg起动马达安装于发动机的曲轴的结构。
3.在专利文献1中,公开了如下发动机起动装置:在发动机起动时,通过控制acg起动马达,执行在使曲轴反转驱动至规定范围之后再切换到正转驱动的回摆控制。
4.现有技术文献
5.专利文献
6.专利文献1:日本特开2000-283010号公报
技术实现要素:
7.但是,在专利文献1的技术中,构成为在停止回摆控制中的反转驱动时,在acg起动马达的转速为规定值以上的情况下停止,在转速小于规定值的情况下在进一步经过了预定时间后再停止,对于使反转驱动准确地停止在所期望的范围的方法依然具有钻研的余地。
8.本发明的目的在于解决上述现有技术的课题,提供一种能够使回摆控制中的反转驱动在所期望的范围准确地停止的发动机起动装置。
9.为了实现上述目的,本发明提供一种发动机起动装置(100),具备:acg起动马达(50),其将发动机(e)的曲轴(c)向正转方向或反转方向驱动并且通过上述曲轴(c)的旋转力发电;曲柄转角传感器(40),其检测上述曲轴(c)的旋转状态;和控制部(80),其使用由上述曲柄转角传感器(40)检测出的旋转状态计算上述曲轴(c)的转速(ne),控制上述acg起动马达(50)的驱动及发电,在上述发动机起动装置(100)中,第1特征在于:上述控制部(80)在上述发动机(e)起动时,执行使上述曲轴(c)反转驱动至规定范围的回摆控制,上述控制部(80)在上述回摆控制中上述转速(ne)超过阈值(ne1)时使上述acg起动马达(50)的输出降低,并且在上述回摆控制中上述转速(ne)成为阈值(ne1)以下时使上述acg起动马达(50)的输出上升。
10.另外,第2特征在于:上述控制部(80)在上述回摆控制后,将上述曲轴(c)向正转方向驱动直至上述发动机(e)起动完成,上述控制部(80)在向上述正转方向的驱动过程中上述转速(ne)超过阈值(ne2)时停止上述acg起动马达(50)的驱动,并且在向上述正转方向的驱动过程中上述转速(ne)成为阈值(ne2)以下时使上述acg起动马达(50)驱动。
11.另外,第3特征在于:上述控制部(80)在上述转速(ne)超过了发动机起动完成阈值(ne3)的情况下判断成上述发动机(e)的起动完成而停止上述acg起动马达(50)的驱动。
12.另外,第4特征在于:对于在上述回摆控制中使反转驱动停止的规定范围的检测,
通过压缩上止点附近的推回进行。
13.另外,第5特征在于:上述曲柄转角传感器(40)包括多个传感器元件,上述转速计算机构(81)使用上述多个传感器元件在上述曲轴(c)旋转一周的期间计算两次以上的上述转速(ne)。
14.另外,第6特征在于:在上述回摆控制中使反转驱动停止的规定范围是在正转方向上稍微超出压缩上止点的位置。
15.另外,第7特征在于:是一种具备发动机起动装置的跨骑式车辆。
16.发明效果
17.根据第1特征,发动机起动装置(100)具备:acg起动马达(50),其将发动机(e)的曲轴(c)向正转方向或反转方向驱动并且通过上述曲轴(c)的旋转力发电;曲柄转角传感器(40),其检测上述曲轴(c)的旋转状态;和控制部(80),其使用由上述曲柄转角传感器(40)检测出的旋转状态计算上述曲轴(c)的转速(ne),控制上述acg起动马达(50)的驱动及发电,在上述发动机起动装置(100)中,上述控制部(80)在上述发动机(e)起动时,执行使上述曲轴(c)反转驱动至规定范围的回摆控制,上述控制部(80)在上述回摆控制中上述转速(ne)超过阈值(ne1)时使上述acg起动马达(50)的输出降低,并且在上述回摆控制中上述转速(ne)成为阈值(ne1)以下时使上述acg起动马达(50)的输出上升,因此,通过在回摆控制的反转驱动中根据acg起动马达的转速切换驱动的进行/停止(on/off),能够使acg起动马达准确停止在规定范围。
18.根据第2特征,上述控制部(80)在上述回摆控制后,将上述曲轴(c)向正转方向驱动直至上述发动机(e)起动完成,上述控制部(80)在向上述正转方向的驱动过程中上述转速(ne)超过阈值(ne2)时停止上述acg起动马达(50)的驱动,并且在向上述正转方向的驱动过程中上述转速(ne)成为阈值(ne2)以下时使上述acg起动马达(50)驱动,因此,在旋转变动容易变大的低速旋转时的旋转不稳定状态下,通过acg起动马达进行辅助直至发动机起动完成,从而能够实现可靠的发动机起动。
19.根据第3特征,上述控制部(80)在上述转速(ne)超过了发动机起动完成阈值(ne3)的情况下判断成上述发动机(e)的起动完成而停止上述acg起动马达(50)的驱动,因此,能够通过监视转速而确认发动机的起动完成。
20.根据第4特征,对于在上述回摆控制中使反转驱动停止的规定范围的检测,通过压缩上止点附近的推回进行,因此,能够提高对规定范围的检测的精度。
21.根据第5特征,上述曲柄转角传感器(40)包括多个传感器元件,上述转速计算机构(81)使用上述多个传感器元件在上述曲轴(c)旋转一周的期间计算两次以上的上述转速(ne),因此,通过在曲轴旋转一周的期间计算两次以上的转速,能够进行更精细的控制。
22.根据第6特征,在上述回摆控制中使反转驱动停止的规定范围是在正转方向上稍微超出压缩上止点的位置,因此,通过延长正转驱动的助起动期间,容易越过压缩上止点,发动机的起动性提高。
23.根据第7特征,由于是具备发动机起动装置的跨骑式车辆,所以能够得到具备发动机的起动性优异的发动机起动装置的跨骑式车辆。
附图说明
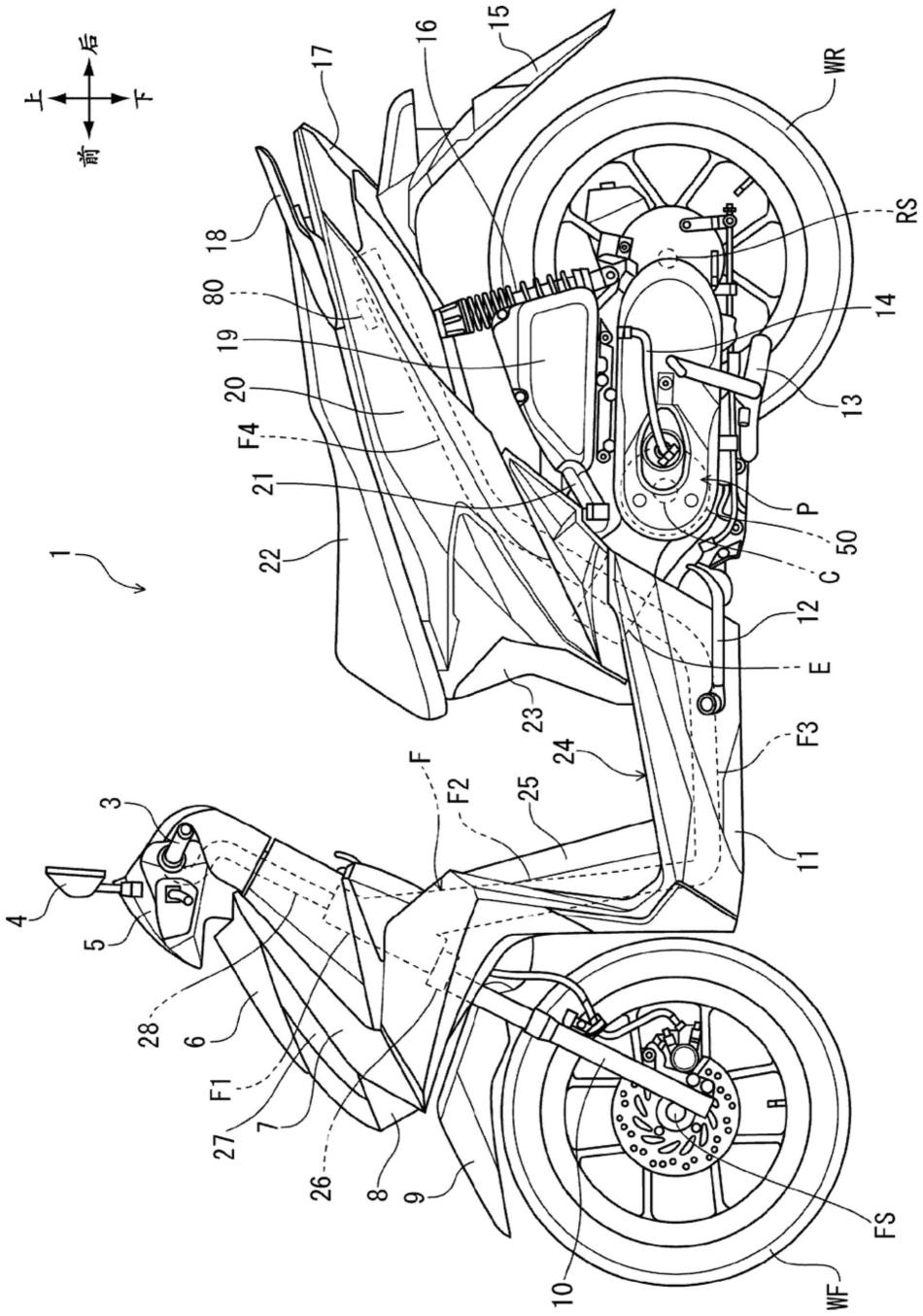
24.图1是作为本发明的一个实施方式的跨骑式车辆的摩托车的左视图。
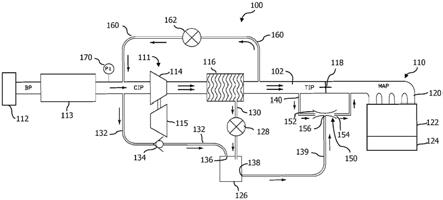
25.图2是表示发动机控制装置的结构的框图。
26.图3是表现了回摆控制的反转驱动时的曲轴转速的推移的曲线图。
27.图4是表示本实施方式的回摆控制的流程的时序图。
28.图5是表示本实施方式的发动机起动控制的步骤的流程图。
具体实施方式
29.以下,参照附图详细地说明本发明的优选的实施方式。图1是本发明的一个实施方式的摩托车1的左视图。摩托车1是在转向把手3与座椅22之间设有供驾驶员的脚搭置的低底板24的踏板型的跨骑式车辆。
30.在车身架f的前端,设有转动自如地轴支承转向轴杆28的头管f1。车身架f包括:从头管f1向后下方延伸的主车架f2;从主车架f2的下端部向车身后方延伸设置的左右一对的下伸车架f3;和与下伸车架f3相连且向后上方延伸的后车架f4。
31.在转向轴杆28的下端部,固定有对通过前轮车轴fs旋转自如地轴支承前轮wf的前叉10进行支承的下横管26。在转向轴杆28的上端部,固定有沿车宽方向延伸的转向把手3。转向把手3的前后被支承仪表装置的把手罩5覆盖。在前叉10上安装有将前轮wf的上方覆盖的前挡泥板9。
32.在配置于转向轴杆28的前方的车宽方向中央的中间罩6与车宽方向左右一对的前侧罩7之间,支承有头灯8及左右一对的信号闪光灯27。在前侧罩7的车身后方,连结有与驾驶员的腿部相对的底板25。
33.座椅22的前下方被座椅下板23覆盖,在座椅下板23的后方,连结有将后车架f4的车宽方向左右覆盖的后罩20。在下伸车架f3的后端的位置,摆动自如地轴支承有将发动机e和变速器一体化的整体摆动式的动力单元p。通过后轮车轴rs旋转自如地轴支承后轮wr的动力单元p的后端部利用后减震器16被吊起于后车架f4。在发动机e的曲轴(crankshaft)c上,固定有作为发电机及发动机而发挥功能的acg起动马达50。
34.在动力单元p的下部安装有中间支架13,在动力单元p的车宽方向左侧面,安装有用于供乘员用脚起动动力单元p的反冲式起动器14。在动力单元p的上部配置有空滤箱19。
35.在低底板24的车宽方向左右,连结有将下伸车架f3的侧方及下方覆盖的下罩11。在下罩11的车宽方向左侧,配置有支承于下伸车架f3的侧支架12。在空滤箱19的前方,配置有支承于后车架f4的后座踏板21。在座椅22的后方,配置有支承于后车架f4的后握把18,在后罩20的后端部配置有尾灯装置17。在尾灯装置17的下方配置有后挡泥板15。作为发动机控制装置的ecu80配置在座椅22的下部。
36.图2是表示发动机控制装置100的结构的框图。acg起动马达50的转动位置即曲柄角度由安装于曲柄转角传感器40的u相传感器40u、v相传感器40v及w相传感器40w检测。在曲柄转角传感器40还设有检测奇异点的pcb传感器40p。由于pcb传感器40p检测奇异点,所以能够检测压缩上止点及排气上止点。
37.在ecu80中包括:基于曲柄转角传感器40的输出信号计算曲轴c的转速的转速计算机构81;控制acg起动马达50的acg起动马达驱动机构82;和对acg起动马达50处于正转反转
的哪一个状态进行判断的正转反转判断部83。acg起动马达50的发电电力经由ecu80返回到蓄电池b。在ecu80中输入有起动器sw(开关)92的输出信号。ecu80除了控制acg起动马达50以外,还控制燃料喷射装置90及点火装置91。
38.本实施方式的曲柄转角传感器40包括三个传感器元件,转速计算机构81使用三个传感器元件在曲轴c旋转一周的期间计算两次以上的转速ne。由此,能够针对转速ne的变化进行更精细的控制。
39.本实施方式的ecu80在发动机e起动时,执行使曲轴c反转驱动至规定范围之后再切换到正转驱动的回摆控制。而且,特征在于,构成为在回摆控制的反转驱动时,交替地进行如下控制:在曲轴c的转速ne超过了阈值ne1的情况下将pwm控制的驱动负载(duty)从100%切换到0%,在曲轴c的转速ne成为了阈值ne1以下的情况下将pwm控制的驱动负载从0%切换到100%,在发生了基于压缩反作用力的推回的时点结束马达的驱动。
40.图3是表现出回摆控制的反转驱动时的曲轴c的转速ne的推移的曲线图。在曲柄转角r=0处,开始acg起动马达50的在驱动负载100%下的反转驱动。接着,在曲柄转角r1处,反转方向的转速ne超过作为阈值的反转上限设定值ne1(例如600rpm)。该反转上限设定值ne1例如以曲轴c不会由于反转而越过压缩上止点的方式进行设定。
41.ecu80在转速ne超过反转上限设定值ne1时,将驱动负载从100%切换到0%。由此,若转速ne开始降低,转速ne成为反转上限设定值ne1以下,则将驱动负载从0%切换到100%。通过该反复操作,acg起动马达50通过仅与曲柄转角传感器40的输出值相应的简单控制就能够大致沿着反转上限设定值ne1持续进行反转驱动。此外,由于曲轴c的惯性力大而会发生控制延迟,所以反转驱动过程中的转速ne成为沿着反转上限设定值ne1的折线图那样。
42.在曲柄转角r2处,根据推回反作用力的产生而检测到曲轴c到达了在正转方向上稍微超出压缩上止点的规定范围这一情况,停止反转驱动。在此,设为由于压缩上止点接近而急剧变大的推回反作用力是在曲柄转角传感器40的上次脉冲与本次脉冲的间隔比率比规定值大的情况下产生的。在产生推回反作用力的区域中,由于推回反作用力与反转驱动力之间的关系,曲轴c几乎不动,因此不会发生从曲柄转角传感器40进行的读入,曲柄转角传感器40的上次脉冲与本次脉冲的间隔比率比规定值大。以单点划线示出的曲线图a示出了由于蓄电池和acg起动马达50的劣化而起动性变差的情况,以双点划线示出的曲线图b示出了反转的开始角度不同的情况。
43.图4是表示本实施方式的回摆控制的流程的时序图。在该时序图中,从上起按顺序示出了曲轴c的转速ne、acg起动马达50的驱动指示、马达负载。在本实施方式中,通过将马达负载限定于100%或0%这两种模式,能够将马达控制简单化,减少设计负担及控制负担。
44.在时刻t=0,acg起动马达50的驱动指示为“停止”,转速ne为零,马达负载也处于零的状态。在时刻t1,根据起动器开关92的开启操作,驱动指示从“停止”切换到“反转”,马达负载被切换到100%。
45.在时刻t2,反转方向的转速ne超过反转上限设定值ne1,由此马达负载被切换到0%。接着,在时刻t3,转速ne成为反转上限设定值ne1以下,由此马达负载被切换到100%。
46.在时刻t4,驱动指示从反转切换到正转,由此马达负载被切换到正转方向的100%。然后,在时刻t5,转速ne超过发动机起动判断设定值ne3(例如1000rpm),由此马达驱
动结束。
47.此外,马达驱动过程中的马达负载100%及0%的切换控制不仅能够在回摆控制的反转驱动中执行,也能够在反转驱动后的正转驱动中也执行。由此,在旋转变动容易变大的低速旋转时的旋转不稳定状态下,通过acg起动马达进行辅助直至发动机起动完成,从而能够实现可靠的发动机起动。
48.图5是表示本实施方式的发动机起动控制的步骤的流程图。在步骤s1中,判断起动器开关92是否开启,若进行肯定判断则进入步骤s2。若在步骤s1中进行否定判断则返回到步骤s1的判断。
49.若在步骤s1中进行肯定判断,则在步骤s2中起动继电器接通。在步骤s3中,将acg起动马达50向反转方向驱动的马达负载被设为100%。在步骤s4中,输出马达反转驱动指令。
50.在步骤s5中,判断转速ne(反转ne)是否超过了反转上限设定值ne1,若进行肯定判断则在步骤s6中马达负载被切换到0%,另一方面,若进行否定判断,则在步骤s7中维持马达负载100%。
51.在步骤s8中,判断是否检测到压缩顶点。详细地说,判断是否为在比压缩上止点向正转方向稍微前进的位置处使反转驱动结束的规定范围。
52.在步骤s9中,以马达负载100%开始正转驱动。在步骤s10中,输出马达正转驱动指令。在步骤s11中,判断转速(正转ne)是否超过了正转上限设定值ne2,若进行肯定判断则在步骤s12中马达负载被切换到0%,另一方面,若进行否定判断,则在步骤s13中维持马达负载100%。正转驱动时的正转上限设定值ne2由于需要越过压缩上止点,所以能够设定成与反转上限设定值ne1(例如600rpm)同等或稍大的值。
53.然后,在步骤s14中,判断转速(正转ne)是否超过了发动机起动判断设定值ne3(例如1000rpm),若进行肯定判断则进入步骤s15,断开起动继电器,结束一系列的控制。另一方面,若在步骤s14中进行否定判断,则返回到步骤s11的判断。
54.如上述那样,根据本实施方式的发动机控制装置100,ecu80在发动机e起动时,执行使曲轴c反转驱动至规定范围的回摆控制,ecu8在回摆控制中转速ne超过阈值ne1时停止acg起动马达50的驱动(设为0%负载),并且在回摆控制中转速ne成为阈值ne1以下时使acg起动马达50驱动(设为100%负载),因此,在回摆控制的反转驱动中根据acg起动马达的转速切换驱动的进行/停止(on/off),能够使acg起动马达50在规定范围准确地停止。
55.此外,摩托车的形态、acg起动马达和曲柄转角传感器的形态、转速的上限设定值等并不限于上述实施方式,能够进行各种变更。本发明的发动机起动装置并不限于摩托车,能够适用于跨骑式的三轮车或四轮车等。
56.附图标记说明
[0057]1…
摩托车、40
…
曲柄转角传感器、50
…
acg起动马达、80
…
ecu(控制部)、81
…
转速计算机构、82
…
acg起动马达驱动机构、83
…
正转反转判断部、100
…
发动机起动装置、e
…
发动机、c
…
曲轴、ne
…
转速、ne1
…
反转上限设定值(阈值)、ne2
…
正转上限设定值(阈值)、ne3
…
发动机起动完成阈值。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。